| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $117.59 | $115.19 | $111.59 | $106.79 | Contact US |
 WIFI V2.0 Pixhawk 2.4.8 Flight Controller w/ I2C Expansion Board + PPM Encoder + RGB LED Indicator
$150.12
WIFI V2.0 Pixhawk 2.4.8 Flight Controller w/ I2C Expansion Board + PPM Encoder + RGB LED Indicator
$150.12
 WIFI V3.0 Pixhawk 2.4.8 Flight Controller w/ I2C Expansion Board + PPM Encoder + RGB LED Indicator
$156.37
WIFI V3.0 Pixhawk 2.4.8 Flight Controller w/ I2C Expansion Board + PPM Encoder + RGB LED Indicator
$156.37
 GEPRC GEP-F405-HD V2 Flight Controller Plug and Play STM32F405 Chip ICM42688-P Gyroscope for DJI Air Unit
$32.08
GEPRC GEP-F405-HD V2 Flight Controller Plug and Play STM32F405 Chip ICM42688-P Gyroscope for DJI Air Unit
$32.08
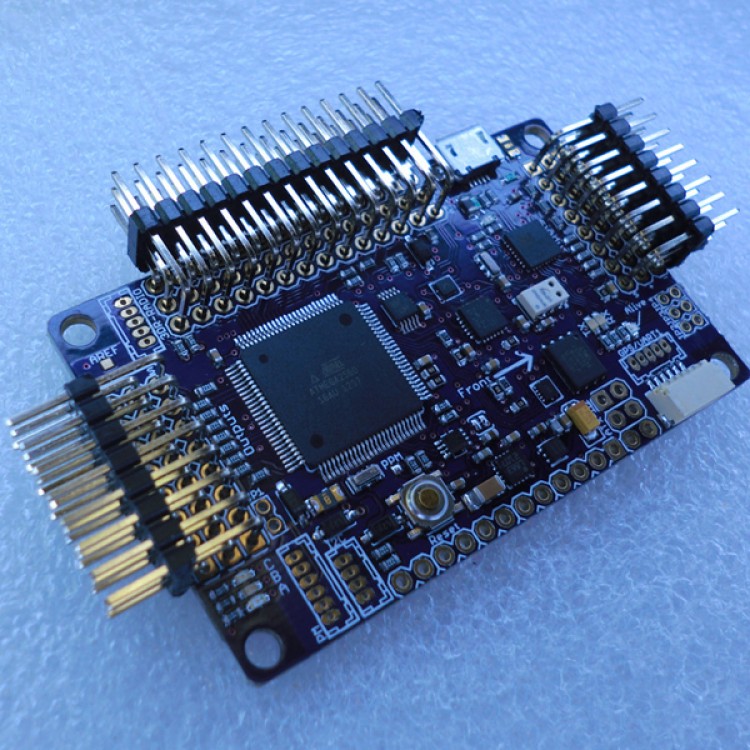
APM2.5 APM2.5.5 Flight Controller Board Multicopter Ardupliot Mega High Precision Version
APM2.5 APM Flight Controller Board Multicopter Ardupliot High Precision Version Released!
ArduCopter 2.5.5 release.
- High precision Precision barometric module MS5611-01BA03
- A patch release which has the following improvements over 2.5.4:
- MPU600 accelerometer scaling fix (affected 3dr APM2s shipped )
-."Retro Loiter" by Adam Rivera (uses ground speed directly from GPS instead of calculating from lon/lat position)
- Optical flow support for APM2
- bug fix for "need to press reset before arming motors"
- This is the new updated ArduPilot Mega 2.5.5 kit. An arduino based open source autopilot. It has been in development for over a year and pushes the limits of AVR and arduino. Featuring the MPU-6000 digital motion processor and other updated sensors allows for improved performance in a much smaller and more affordable package. The MPU-6000 takes care of the sensor fusion, allowing more space on the main ATmega 2560 processor for advanced features. The high precision MEAS MS5011 pressure sensor is another new addition to the ardupilot mega 2 board. This barometric pressure sensor has a resolution of 10cm, this makes altitude hold on your arducopter much more precise.
Since this is an open source autopilot board, you can access the source code to customise the ardupilot code to suit your needs. However the code is ready to use as is for users who dont care about the inner workings. You just need to load the open source autopilot software to your board with a few mouse clicks via the ardupilot mission planner software. You can use the board to control your aircraft (arduplane), your multi rotor or helicopter (arducopter), your boat (arduboat) and also your ground robot (ardurover)
- The same open source autopilot code runs on both ardupilot mega V1, and V2 boards.
Features
- Tripple Core Autopilot
- Arduino Compatible
- Open source autopilot code for fixed wing (arduplane) and rotor wing (arducopter) platforms
- 8 PWM outputs (can be increased to 11 using 3 analog inputs)
- 8 PWM inputs
- 12 analog/digital I/O pins for extra sensors like sonar, airspeed sensor, current sensor etc...
- Digital compass powered by Honeywell's HMC5883L-TR chip, now included on the main board.
- Onboard Dataflash chip.
- State of the art sensors (MPU-6000 with digital motion processing)
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties
- Smaller than Ardupilot Mega v1 - 2.6x1.6 inches (66x41mm)
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
- Pre soldered - no soldering required!