| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $151.98 | $148.88 | $144.22 | $138.02 | Contact US |
 APO-A3 ESC 7-30V Single Channel Electronic Speed Controller 30A Current Limit for Fighting Robot
$38.30
APO-A3 ESC 7-30V Single Channel Electronic Speed Controller 30A Current Limit for Fighting Robot
$38.30
 GEPRC GEP-BLS50A-4IN1 ESC Plug and Play STM32F405 Chip ICM42688-P Gyroscope for DJI Air Unit
$37.91
GEPRC GEP-BLS50A-4IN1 ESC Plug and Play STM32F405 Chip ICM42688-P Gyroscope for DJI Air Unit
$37.91
 Hobbywing X13 Power System 18S-CCW Motor + ESC + 56" Propeller 57KG Thrust for Agricultural Drones
$711.90
Hobbywing X13 Power System 18S-CCW Motor + ESC + 56" Propeller 57KG Thrust for Agricultural Drones
$711.90
LCDA86H 2 Phase Nema34 Closed Loop Driver +LC86H268 86 Nema34 Closed Loop Stepper Motor
Stepper Motor Description:LCDA86H using the latest dedicated motor control DSP chip and vector closed-loop control technology, completely overcome the open-loop stepper motor stepped the problem, while significantly enhance the motor high-speed performance, reduce motor heating and reduce motor vibration, improve machine processing speed and accuracy of the machine Energy consumption. This drive takes into account the dual advantages of stepping and servo, and its price than the market on the servo system significantly reduced by 50%, is the best choice for customers to upgrade.
Stepper Motor Features:
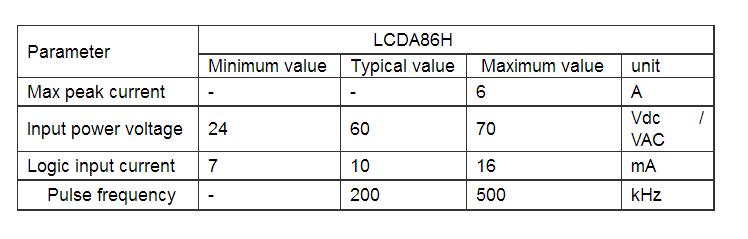
1. Voltage input range: VAC: 20 ~ 70V OR VDC: 30 ~ 100V
2. Maximum peak current: 6A
3. Subdivision range: the default 4000 / rev, through the debug board can be set to any subdivision (200-51200)
4. Pulse limit frequency: 200KHZ
5. Signal input: pulse, direction and enable signal
6. Output signal: in place signal and fault output signal
7. Motor encoder feedback: AB differential input
8. Closed-loop vector control to ensure that the motor high-speed large torque output, while ensuring that the motor does not lose step
9. With over-voltage, over-current, tracking error tolerance and other protection functions
Stepper Motor Main parameters:
1. Electrical Specifications
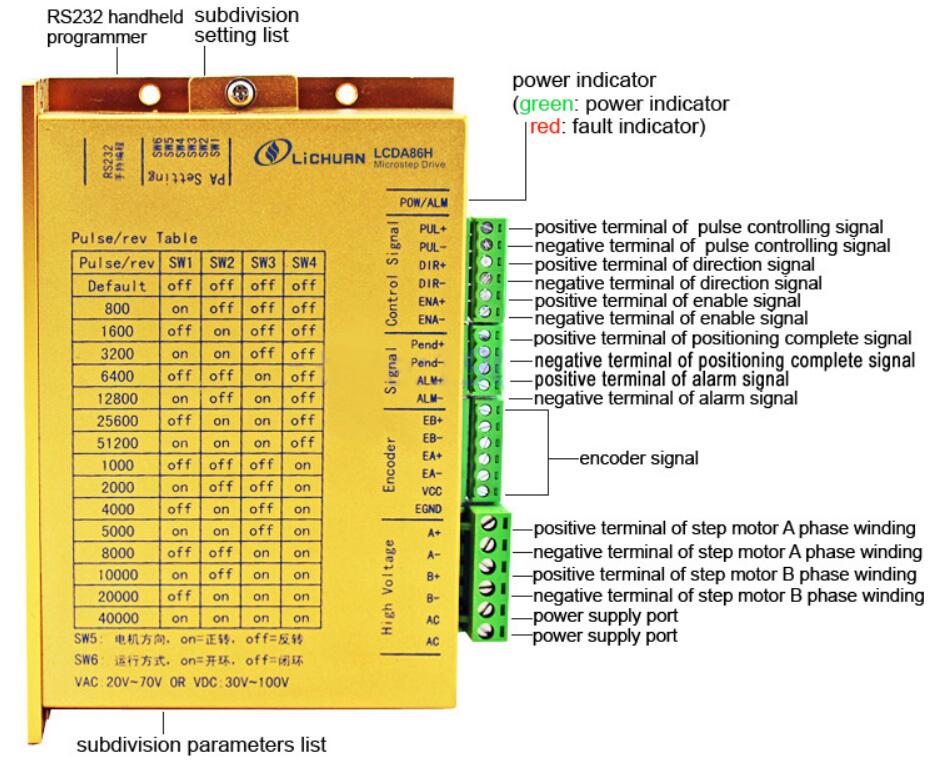
2.Interface definition
1) Motor & power input port
Symbol:A+ Name:A-phase motor winding positive terminal
Symbol:A- Name:A phase motor winding negative terminal
Symbol:B+ Name:B-phase motor winding positive terminal
Symbol: B- Name: B-phase motor winding negative terminal
Symbol: AC Name: Power supply access terminal Explanation:VAC:20-70V
Symbol: AC Name: Power supply access terminal Explanation:VDC:30-100V
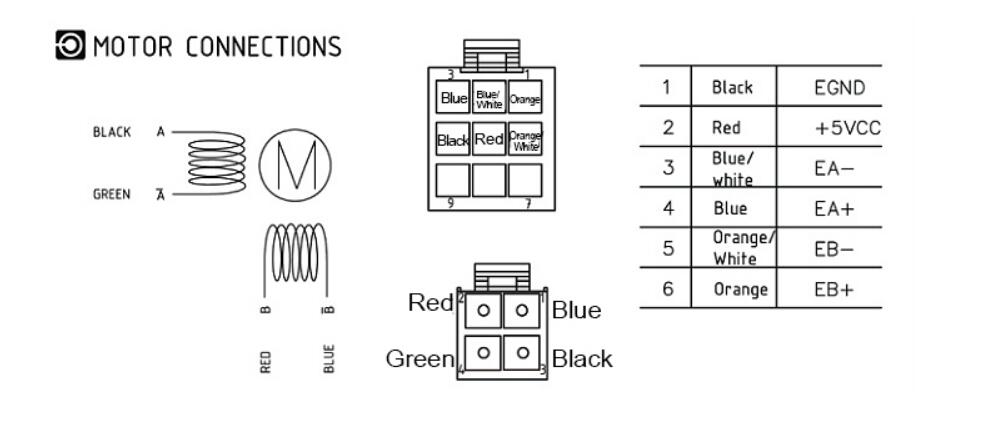
2) Encoder signal input port:
Symbol:EB+ Name:Motor encoder B phase positive input
Symbol:EB- Name:Motor encoder B phase negative input
Symbol:EA+ Name:Motor encoder A positive input
Symbol:EA- Name:Motor encoder A phase negative input
Symbol:VCC Name:Encoder power supply
Symbol:EGND Name:Encoder power ground
3) Control signal port:
- Name:PUL+
Explanation:Pulse input signal: pulse rising edge effective; in order to reliably respond to the pulse signal, the pulse width should be greater than 2.5μs. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:PUL-
Explanation:Pulse input signal: pulse rising edge effective; in order to reliably respond to the pulse signal, the pulse width should be greater than 2.5μs. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:DIR+
Explanation:Directional input signal: The direction of the motor is switched by the high / low level signal, which should be established at least 5μs before the pulse signal. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:DIR-
Explanation:Directional input signal: The direction of the motor is switched by the high / low level signal, which should be established at least 5μs before the pulse signal. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:ENA+
Explanation:Enable control signal, this input signal is used to enable or disable the driver output. When this function is not needed, the enable signal can be left floating. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:ENA-
Explanation:Enable control signal, this input signal is used to enable or disable the driver output. When this function is not needed, the enable signal can be left floating. Such as the use of +12 V or +24 V series resistance required 3K.
- Name:Pend+
Explanation:Positioning completion signal positive side
- Name:Pend-
Explanation:Positioning completion signal negative
- Name:ALM+
Explanation:Alarm output positive terminal
- Name:ALM-
Explanation:Alarm output negative terminal
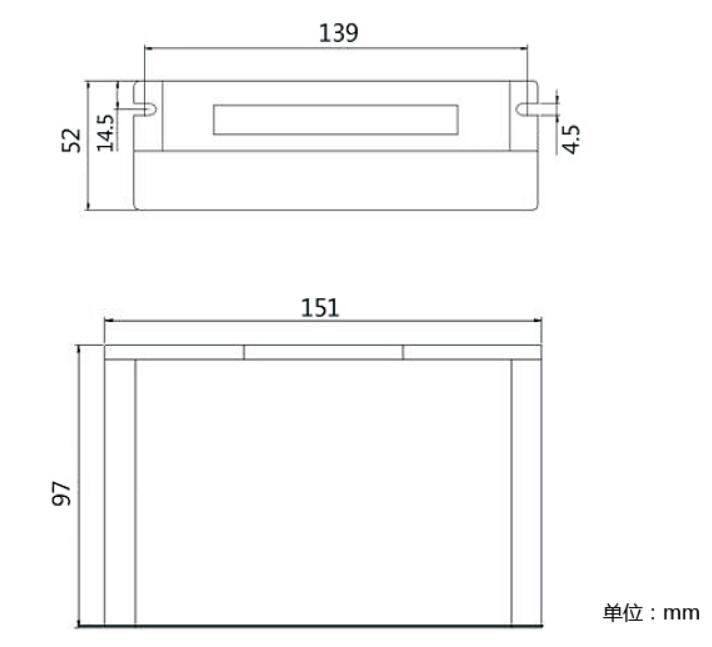
Dimension:
Wiring method:
Stepper Motor Application Areas:
Suitable for all kinds of small and medium-sized automation equipment and equipment, such as: engraving machine, stripping machine, marking machine, cutting machine, laser machine, medical equipment, CNC machine tools, automatic assembly equipment, electronic processing equipment. In the user expectations of low noise, high speed equipment in the application of special results
Stepper Motor Description:
Two-phase 86 series closed-loop stepper motor, the use of high-quality raw materials and high-standard permanent magnet silicon steel, with 1000-line high-precision encoder, completely overcome the open-loop stepper stepping machine problems, while significantly enhance the motor high-speed performance ,To facilitate the traditional step-by-step drive program upgrade, cost reduction compared to servo motor to reduce more than 50%. Motor length 82mm ~ 178mm between the torque range: 3N.m ~ 12N.m, motor shaft diameter 14mm.
Stepper Motor Electrical Specifications:
Motor model:LC86H268
Step/angle:1.8 degree
Length:68+22mm
Holding torque:3.5N.M
Current:6A
Rotor inertia:1400g.cm2
Encoder line:1000PPR
Lead wire:NO.4
Weight:2.2kg
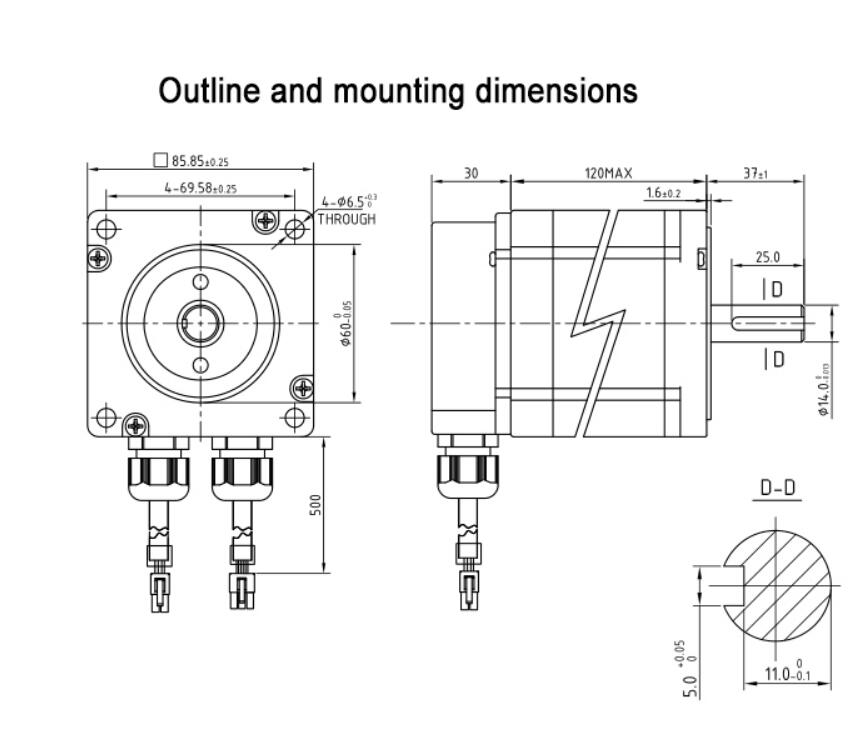
Dimension:
Notes: The above is only for representative products, We can according to customer requirements to remake.
Model:LC86H268
Shaft Diameter:14mm
Shaft Extension:Flat Key 5x5x25
Shaft Length:37mm
Wiring method:
Stepper Motor Application Areas:
Suitable for all kinds of motion control automation equipment and instruments, such as: electronic processing and testing, semiconductor packaging, laser cutting and welding, laser phototypesetting, packaging machinery, engraving machine, marking machine, cutting machine, garment plotter, CNC machine tools, automation Assembly equipment and so on. Is the user expect low noise, high-speed performance and cost-effective competition in the field of choice
Package List:
- 1 x LCDA86H Nema34 Closed Loop Driver
- 1 x LC86H268 86 Nema34 Closed Loop Stepper Motor








