| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $12.09 | $11.85 | $11.48 | $10.98 | Contact US |
 Unassembled Voice Recognition Version 12DOF Quadruped Bionic Robot Cat WiFi/Bluetooth/Voice Control Programmable Robot
$95.35
Unassembled Voice Recognition Version 12DOF Quadruped Bionic Robot Cat WiFi/Bluetooth/Voice Control Programmable Robot
$95.35
 Unassembled Normal Version 12DOF Quadruped Bionic Robot Cat WiFi/Bluetooth Control Programmable Robot
$81.75
Unassembled Normal Version 12DOF Quadruped Bionic Robot Cat WiFi/Bluetooth Control Programmable Robot
$81.75
 Unassembled Normal Version 12DOF Humanoid Robot Opensource Programmable Robot for Arduino
$83.72
Unassembled Normal Version 12DOF Humanoid Robot Opensource Programmable Robot for Arduino
$83.72
2WD RC Smart Robot Car Kit Infrared Line Tracking Following Obstacle Avoidance Unassembled
Attention:
- The car sensor is susceptible to natural light interference and is suitable for demonstration in a dark room. The car cannot be programmed. No soldering is required. Need to assemble and debug by yourself, with instructions. Shipped without batteries.
- Shipped with instructions including schematics.
- Accessories are included and need to be assembled by yourself. The product is a pure hardware circuit, which requires no programming and no soldering.
Features:
- Multifunctional smart car for tracking, following and avoiding obstacles.
- No programming is required. Circuit board has been soldered, no soldering iron is needed. Suitable for primary and secondary school students.
- Three functions: Obstacle avoidance, tracking, following. Select functions via dip switches. It is easy to operate.
Download Materials:
https://pan.baidu.com/s/1JQBvNB-PSvUAAkK373ZLyQ
Function Introduction:
Function 1: Tracking Mode
1.Principle:
Turn dip switches 1 and 2 upwards to set it to tracking mode. The smart car's tracking sensor is a pair of infrared transmitting and receiving integrated tubes, which absorb light in black. In this way, infrared light emitted can not be reflected on the receiving tube. White reflections reflect infrared light onto the receiver. Since track color is black, it can absorb infrared light. In this way, the receiving end of the probe does not receive the infrared radiation emitted by infrared transmitting tube, and the car detects black track at this time. If the probe on the right detects black line, the car will move to the right, so left motor will move forward and right motor will stop. Similarly, when the left probe detects black line, the car will move to the left.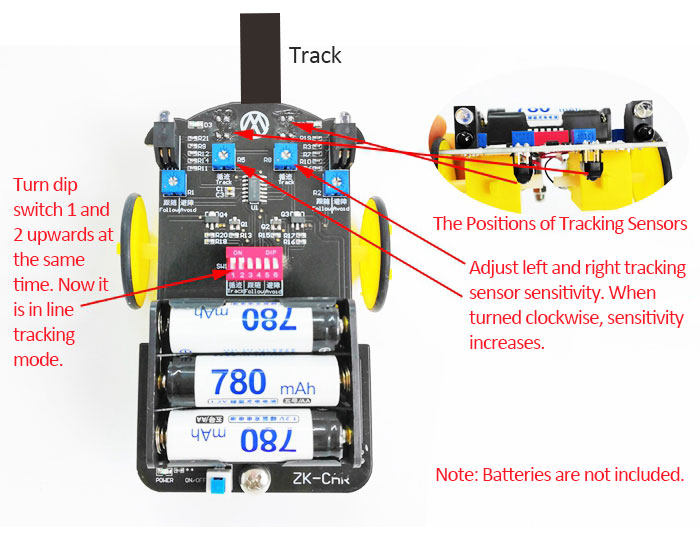
2. Debugging Method:
Knowing the principle of black line tracking motion, we can adjust the ranging distance of the car tracking probe according to this principle.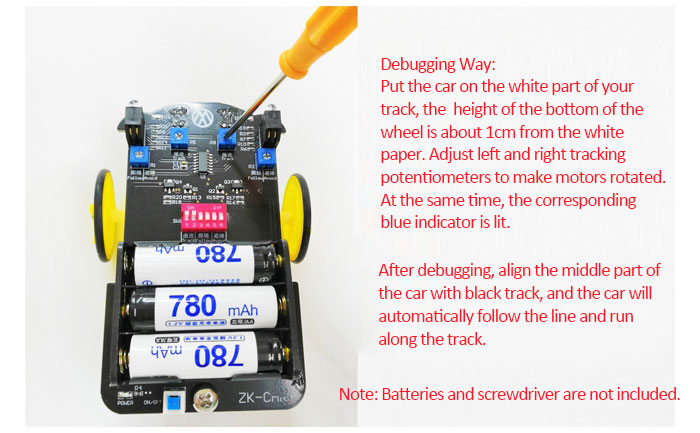
Function 2: Following Mode
1.Principle:
Turn dip switches 3 and 4 upwards, and now it is in following mode. According to the function principle of infrared following, the car remains stationary when there is no object ahead. When the right probe detects hands, the motor on the left will move, while the motor on the right will remain stationary. The car will then turn to the right and follow the object on the right. Adjust adjustable resistors Follow / Avoid behind the left or right probe clockwise. You can find that the distance between our hand and the left or right probe is getting farther and farther, so the detection distance of infrared probe is adjusted. Adjust adjustable resistors according to users' own needs. Similarly, when using infrared obstacle avoidance function, we can adjust adjustable resistors Follow / Avoid by hand or other obstacles according to detection distance.
2.Debugging Way: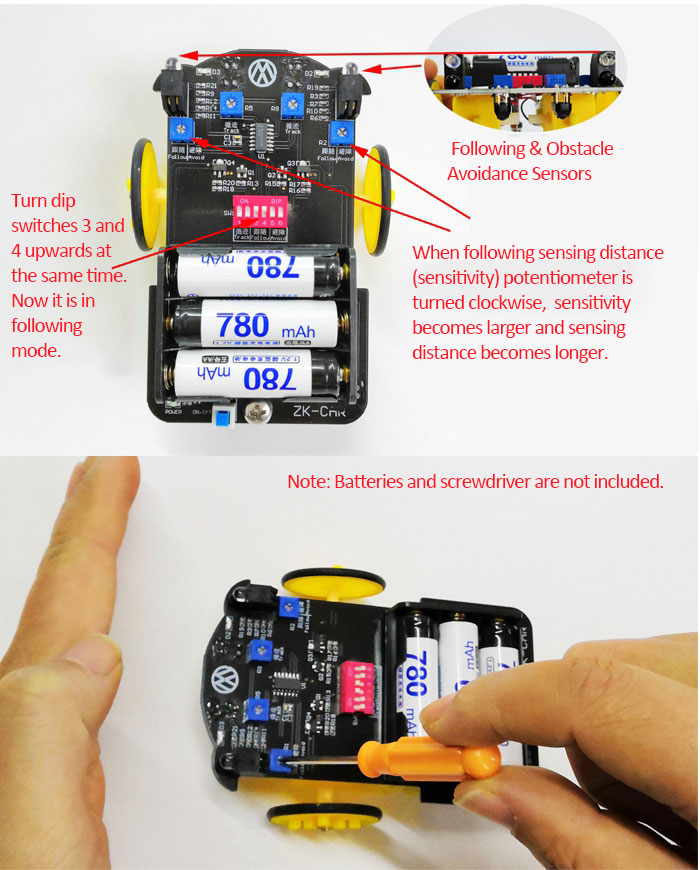
Function 3: Obstacle Avoidance Mode
1.Principle:
Turn dip switches 5 and 6 upwards and now it is in obstacle avoidance mode. Infrared obstacle avoidance uses the same two sets of probes as infrared following, namely a pair of infrared tubes. The way to debug obstacle avoidance probes is the same as the way to debug infrared following, by adjusting adjustable resistors to complete the detection distance of the probe. However, when using hands to shield the probe, the movement of motors is different from that of the tracking experiment. When no obstacles are encountered, the car will move forward. When the right probe detects an obstacle, the left motor will stop moving, the right motor will continue to move, and the car will moves to the left as a whole. In this way, it avoids the obstacle on the right. Similarly, after the left probe detects an obstacle, the car will move to the right, avoiding the left obstacle.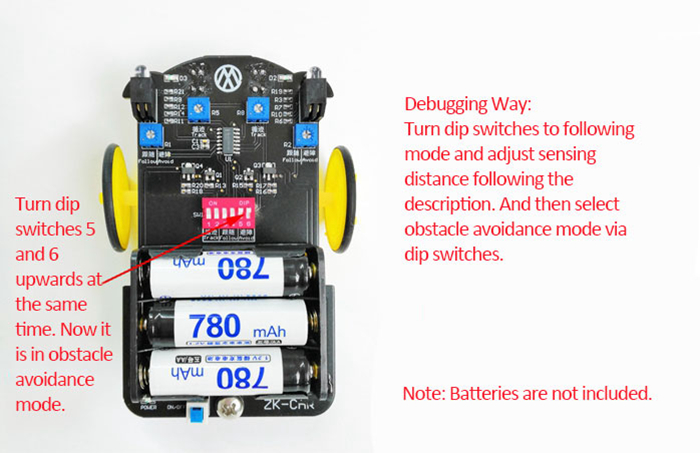
2.Debugging Method:
You can adjust distance in following mode. And back to obstacle avoidance mode. But the effect in following mode is different from that of obstacle avoidance mode.
Adjustable resistors Follow/Avoid are behind sensors.
Package Included:
- 1 x Set of Smart Car Kit
Note:
- Assembling is needed.
- Batteries are not included.














