| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $119.91 | $117.47 | $113.79 | $108.90 | Contact US |
 ASSAN AG63 Pro Anti-Sideslip Brake Gyro Braking Steering Gyroscope AG63Pro for Fixed-Wing Aircrafts
$66.04
ASSAN AG63 Pro Anti-Sideslip Brake Gyro Braking Steering Gyroscope AG63Pro for Fixed-Wing Aircrafts
$66.04
 DALRC 2.4G Power Amplifier 11DB Range Extender Amplifier Suitable for RC Models 2.4G RC Controllers
$42.69
DALRC 2.4G Power Amplifier 11DB Range Extender Amplifier Suitable for RC Models 2.4G RC Controllers
$42.69
 DALRC 2.4G Power Amplifier 8DB Range Extender Amplifier Suitable for RC Models 2.4G RC Controllers
$42.69
DALRC 2.4G Power Amplifier 8DB Range Extender Amplifier Suitable for RC Models 2.4G RC Controllers
$42.69
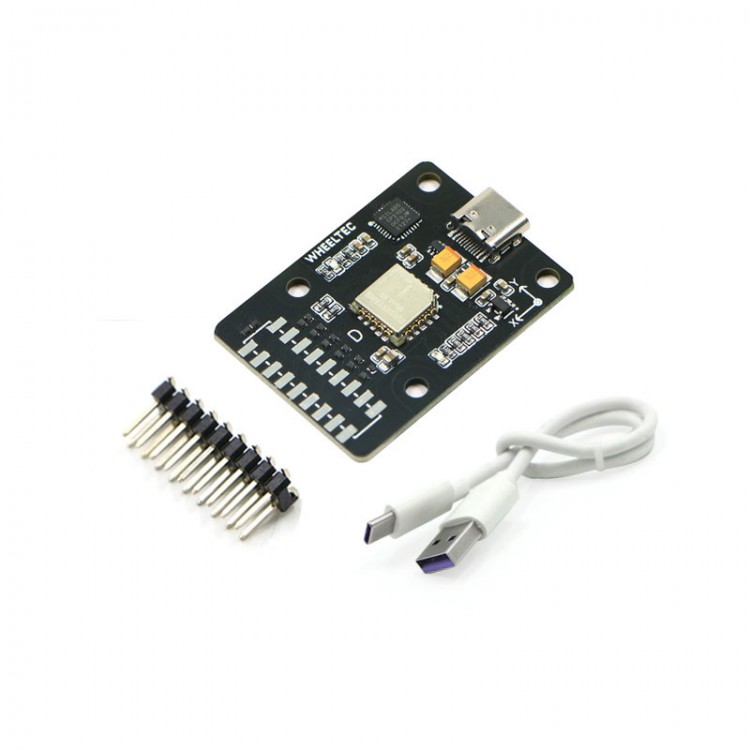
WHEELTEC 9-Axis IMU Module Inertial Measurement Unit FDISYSTEMS AHRS Gyro MEMS N100N without Shell
Features:
- High-precision 9-axis IMU module
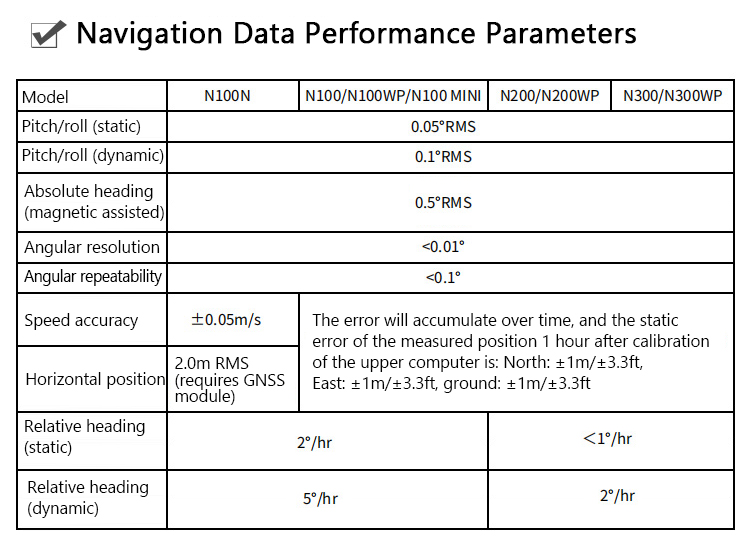
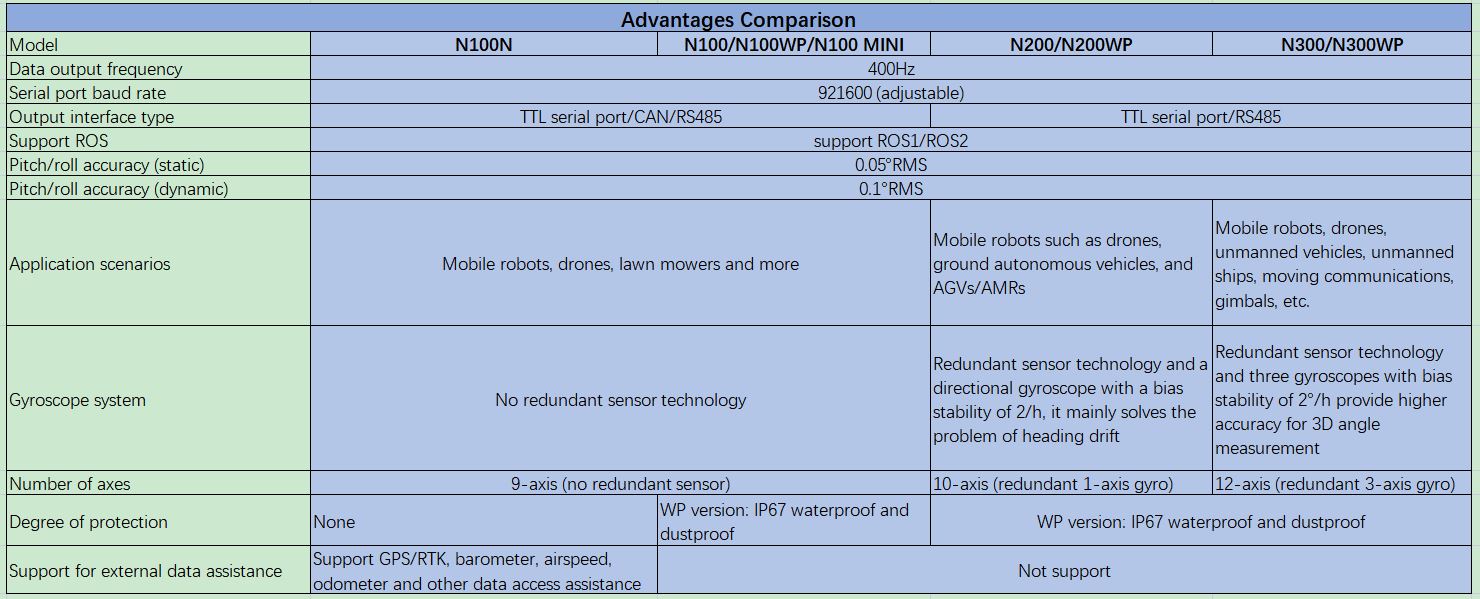
- High-precision ROS IMU module is comparable to advanced IMU modules, with 400Hz output frequency
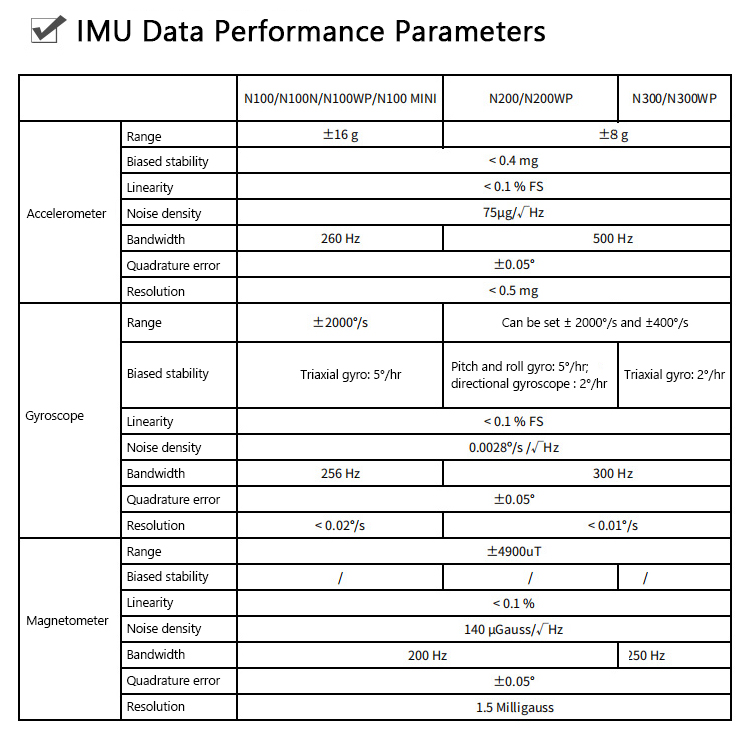
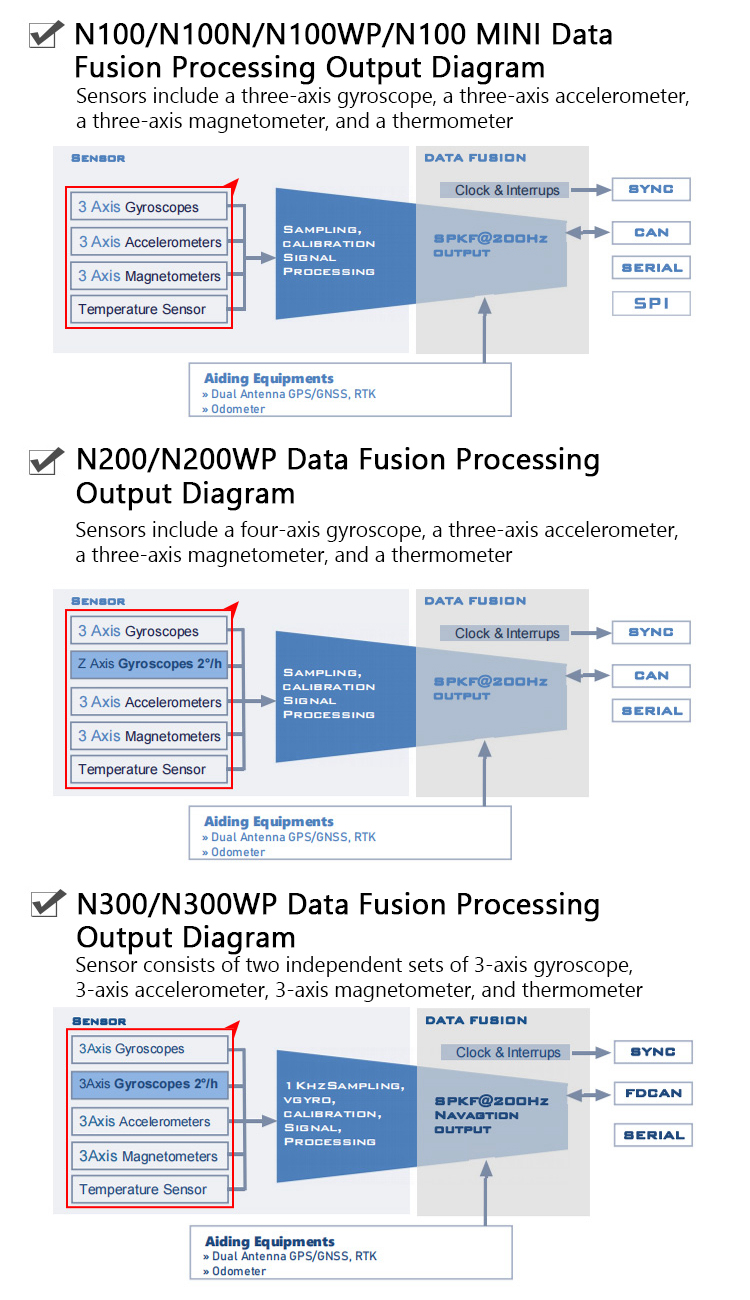
- Multi-axis redundant gyroscope; dynamic angular accuracy 0.1°RMS; resistance to magnetic interference; Kalman fusion algorithm; 400HZ data output frequency; support CAN/RS485 communication; support TTL communication; provide a host computer for Windows; support ROS1/ROS2; Provide STM32 & solution routines for Arduino
- Rich data output: triaxial acceleration, three-axis gyroscope, triaxial magnetometer, three-axis Euler angle, quaternion, directional cosine matrix, velocity, and location
- Compared with N100, N100N adds GNSS module access interface
- Ultra-high frequency data output: The sensor raw data output frequency is 400Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion calculation navigation data output frequency 200Hz: Euler angle, quaternion, directional cosine matrix, position (combined with GNSS), and speed
- Compatible with ROS1 and ROS2 systems: IMU data output frequency up to 400HZ, navigation data output frequency up to 200HZ, providing C/C++ data protocol, ROS1 and ROS2 function packages and tutorials. Quick and easy to get started
- The whole series supports TTL serial communication output. Its TTL serial port can be connected to an external module to convert to RS485 output. N100/N100N/N100WP/N100 MINI supports CAN communication output
- Its type C interface supports both forward and reverse plugging. It can withstand 10,000 repeated plugging and unplugging
- Pin header can be used for TTL and CAN communication
Overall Parameters:
- Input voltage: 5V
- Operating current: < 40mA
- Baud rate: 921600
- Default interface encapsulation: Type C
- Reserved interfaces: TTL/485 and CAN (for N100/N100N)
- Data protocols: FDILink Binary, FDILink ASCII, and NMEA
- IMU data output frequency: data content (acceleration, angular velocity, magnetic field vector); Output frequency: 400HZ
- Navigation data output frequency: data content: Euler angle (Yaw, Pitch, Roll), quaternion, directional cosine matrix, speed, position; output frequency: 200HZ
- Built-in fusion engine: adaptive nonlinear Sigma-point Kalman filter; User-configurable online estimation of auxiliary observation source parameters; Isolation of wild values and anomaly detection; Adaptive filtering
- Support external data assistance (N100N only): support GNSS, RTK, barometer, airspeed tube, odometer and other data
- Command configuration function: Support serial command configuration: restart, calibration, mode switching, etc
- Operating temperature: -40°C to +85°C
Functions:
- Provide a powerful upper computer: The powerful and user-friendly GUI supports online parameter modification (power-down saving), calibration, data LOG and display
- Examples of ROS application scenarios: It can output IMU, navigation data topics, and support attitude visualization
- Support for MATLAB to collect data directly: The routine (for Matlab) outputs 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for SCOPE observation and related secondary development
- Support Python to collect data directly. Output 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for related secondary development
- STM32 solution routines are provided. Supports output of 9-axis raw data, filtered angle, speed, quaternion, and timestamp
- Provide solution routines for Arduino. Supports output of 9-axis raw data, angular velocity, angle, quaternion and timestamp. Data is output directly on the ArduinolDE's serial monitor, which can be used after simple wiring
- Application: Industrial automation, quad-copters, service robots, and military scenarios
Package Included:
- 1 x N100N without Shell
- 1 x USB Cable
- 1 x Pin Header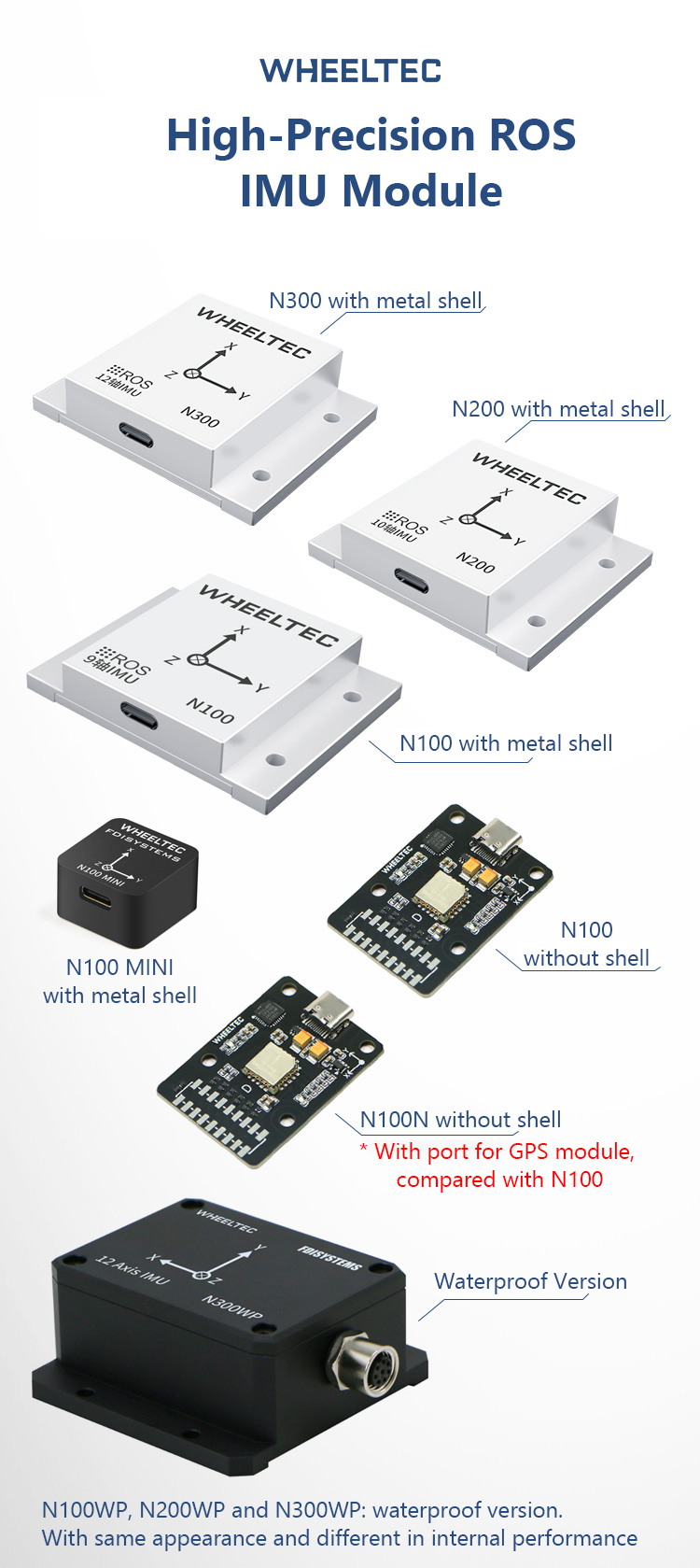
Note:
- CAN interface needs to be connected to the CAN level conversion module before using.
- RS485 interface of the non-WP (non-waterproof version) needs to be connected to the 485 level conversion module to be used.