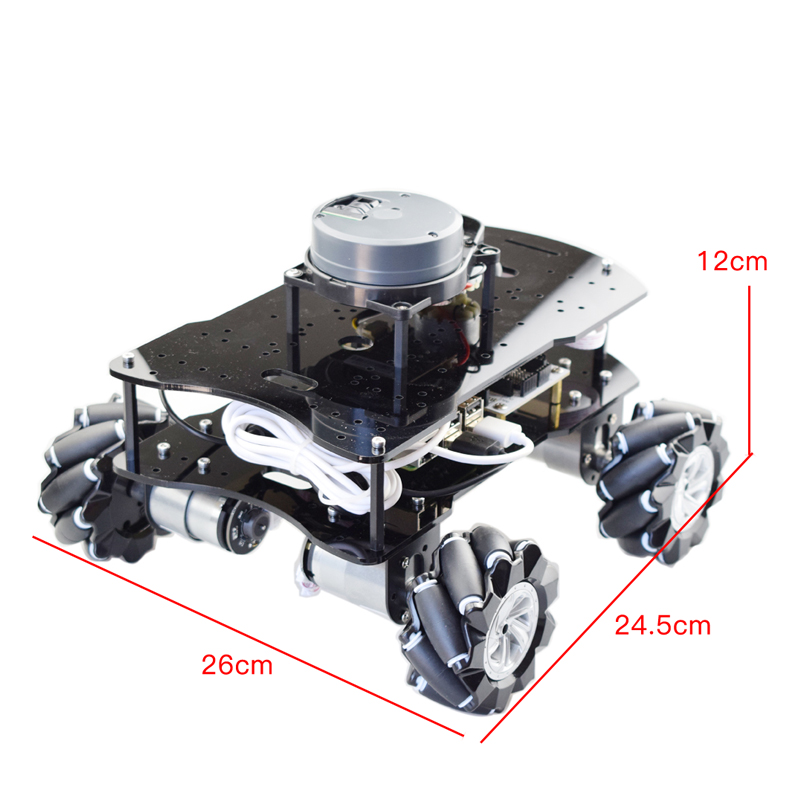
4WD Smart Robot Kit Unassembled Programmable Secondary Development For Raspberry Pi (ROS/MEGA2560)
Availability:
In stock, usually dispatched in 1 business day
-
Price:$271.65
-
Price in reward points: 2717
Reward Points: 27
-
| Quantity |
3+ units |
10+ units |
30+ units |
50+ units |
More |
| Price /Unit |
$266.22 |
$260.78 |
$252.63 |
$241.77 |
Contact US |


")
")
")
")
")




")






