| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $72.20 | $70.72 | $68.51 | $65.57 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV New Pixhawk V6X Intelligent Opensource Flight Controller with NEO 3 GPS Module (45cm Cable) for Multi-rotor Drones
$290.93
CUAV New Pixhawk V6X Intelligent Opensource Flight Controller with NEO 3 GPS Module (45cm Cable) for Multi-rotor Drones
$290.93
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
Features:
- Support four-star, for u-blox M10 10th generation satellite receiving system; Four sets of GNSS concurrent reception, supporting for Beidou, Galileo, GLONASS, GPS/QZSS positioning systems. The receiver can select the best signal to maximize location availability, enabling the positioning module to perform well in complex environments such as urban canyons.
- Accurate positioning, integrated with dual SAW + LNA, internal temperature compensated crystal oscillator, dual channel low-noise amplification architecture, and active receiving antenna composed of RF filtering system, providing excellent receiving sensitivity and acquisition time, which can effectively improve positioning accuracy.
- Adopting a brand new STM32H5 CPU processor for ArmCortex-M33, the operating frequency can reach 250MHz, providing stronger computing power for the system. Running CUAV's newly independently developed highly flexible M4C architecture software can efficiently achieve customized development and upgrades.
- Strong anti-interference ability, internally integrated with the new IS2MDC electronic compass for ST, with a dynamic range detection of up to ±50Gs magnetic field, and integrated temperature offset compensation function, it has a high dynamic range and anti-magnetic field interference ability among similar products.
- Adopting for DroneCAN communication, compatible with mainstream open-source controller protocol stacks for ArduPilot and PX4, with a wide range of applications and stronger scalability and flexibility.
- Equipped with an 8-channel bus controllable RGB light group, it can present multi-level and rich state effects. Multi frequency linkage with built-in buzzer, through intelligent scene recognition, can generate multiple recognizable states, covering multiple working modes such as controller unlock switch, battery level, positioning, and fault.
Specification:
- Satellite receiver: for u-blox MIA-M10Q
- Processor: STM32H5 for Arm Cortex-M33 250MHz
- Working frequency band:
GPS: L1 C/A
GLONASS: L1OF
Beidou: B1I/B1C
Galileo: E1B/C
QZSS: L1 C/A L1S
SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGAN
- Concurrent generator: for Beidou, Galileo, GLONASS, GPS/QZSS
- Oscillator: TCXO
- Acquisition speed: 27s for cold start; 1s for re-acquisition; 1s for auxiliary start
- Navigation refresh rate: up to 10Hz (four concurrent GNSS); up to 25Hz (single concurrent GNSS)
- Horizontal precision: 1.5m CEP
- Signal completeness: RF interference and interference detection report, cheat detection and report
- Communication protocol: DroneCAN
- Upgrade support: yes
- Running firmware: CUAV M4C GNSS
- Data interface: JST GH1.25 4P
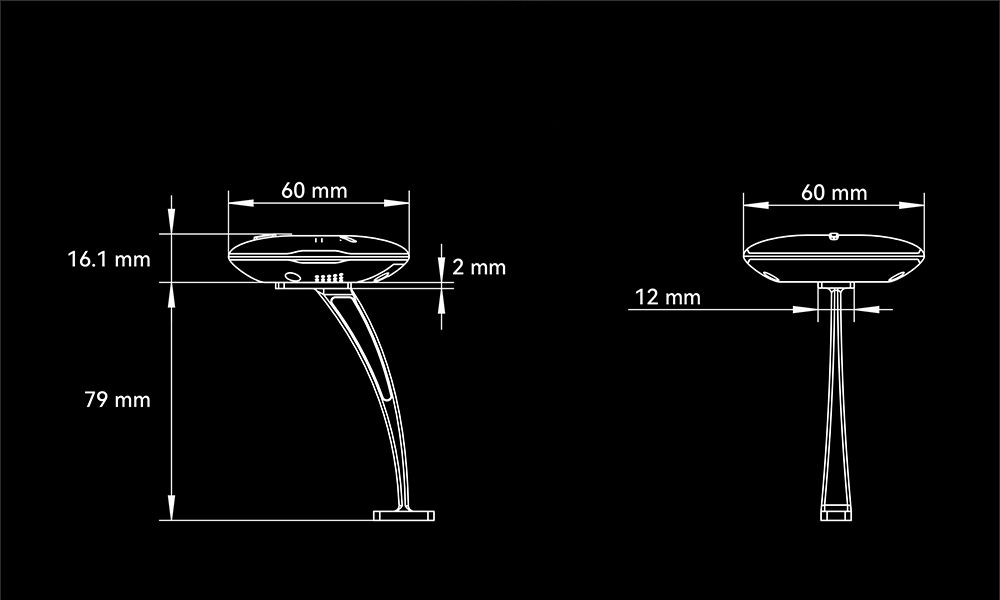
- Product size: 60 x 60 x 16.1mm
- Product net weight: 33g
- Working voltage: 4.7 - 5.2V
- Operating temperature: -10 to +80℃
Package Included:
- 1 x GPS Module
- 1 x CAN Data Cable (cable length: 35cm)
- 1 x GPS Holder
- 1 x 3M Double-side Adhesive
- 2 x Fixing Screws






 Nora Version")
 Nora Version")



 Nora + USL")
