| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $71.81 | $70.35 | $68.15 | $65.22 | Contact US |
 K20 20KG Low-Profile Underwater Servo Waterproof Servo Motor with 1.5m Cable and 5m Waterproof Depth
$56.32
K20 20KG Low-Profile Underwater Servo Waterproof Servo Motor with 1.5m Cable and 5m Waterproof Depth
$56.32
 K12 12KG Low-Profile Underwater Servo Waterproof Servo Motor with 1.5m Cable and 5m Waterproof Depth
$56.32
K12 12KG Low-Profile Underwater Servo Waterproof Servo Motor with 1.5m Cable and 5m Waterproof Depth
$56.32
 NANGU K-5 5KG Micro Coreless Servo Digital Servo (Waterproof & 21T 5mm Output Gear) w/ Gear Shift
$35.19
NANGU K-5 5KG Micro Coreless Servo Digital Servo (Waterproof & 21T 5mm Output Gear) w/ Gear Shift
$35.19
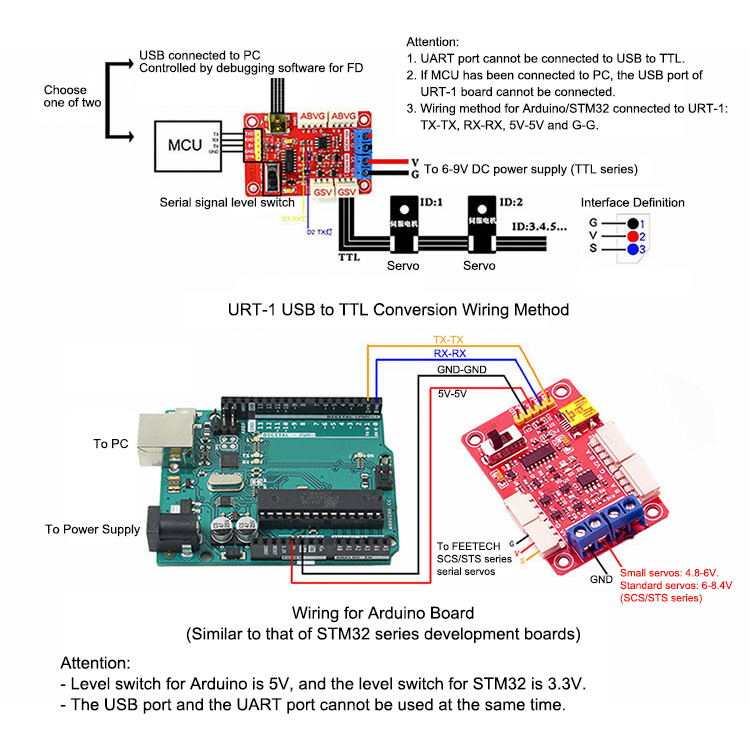
FEETECH STS3025BL Serial Servo 12V 20KG 360-Degree All Metal Servo + URT-1 Board and USB Cable
Features:
- 12V 20KG full metal brushless motor with steel gears. 360° high-speed serial servo. Acceleration start-stop / TTL communication level / one-key setting of middle position / step mode / multi-turn mode / overload protection.
- The shell is made of CNC all-aluminum alloy. The all-aluminum alloy shell has good thermal conductivity and higher precision with CNC machining. The corrosion resistance of aluminum is further improved by anodizing the housing.
- Steel gears and steel servo horn. The full set of gears adopts steel gears, with steel gear shaft and all-metal upper and lower covers, which can better lock the center distance of the gears, and enable higher accuracy and better strength.
- Brushless motor: Using brushless motor as power source, self-developed brushless motor circuit board drive and steel gears, it has a better service life and is suitable for industrial equipment.
- Multi-turn and large-angle precise control: Under the highest accuracy, it can control and feedback the absolute position of plus or minus 7 turns, and the expansion of the resolution value can achieve hundreds of rotations. Note: turn numbers cannot be saved after power loss. Only the absolute position feedback value can be kept.
- 12-bit high-precision contactless magnetic encoder sensor: Using 12-bit high-precision magnetic encoder angle sensor, relative to the potentiometer, the angle is expanded to 360 degrees, the resolution is increased by 4 times, the absolute position is 4096 resolution at 12 bit, and the highest position resolution is 0.088 degrees. For example, controlling 90 degrees, that is, the input is 4096/360*90=1024. Control 360 degrees, i.e. input 4095.
- Acceleration start and stop function: Custom acceleration and velocity values for gentle movement during stroke. It has a better protection effect on gears.
- Four working modes: Mode 1: Position mode by default. In this mode, 360-degree absolute angle control can be achieved to support acceleration movement. Mode 2: Speed closed-loop motor mode. As the load increases, it intelligently maintains speed and does not slow down. Mode 3: Speed open-loop motor mode. As the load increases, it continues to slow down. Mode 4: Step mode. After sending the position command, it will move towards the target position. Send the command again, and based on the current target position, it will continue to step in the same direction. By analogy, positional motion based on relative position can be performed in multiple turns in one direction continuously.
- One key to calibrate middle position: 360 degree angle allows installation at any position. 40 address input 128 can adjust the current position to the middle position (2048) with one key. It is very convenient to install, which can improve production efficiency and reduce maintenance cost. (This function is only provided by magnetic encoder. The servo of potentiometer can only be installed after the angle is adjusted.)
- Overload protection: When the external torque reaches 80% of the stalled torque, the timer will be triggered and the torque protection mode (customizable) will be enabled.
- Over-temperature protection: When the temperature is over 80℃, it will automatically stop the output torque.
- Real-time feedback: Support real-time feedback of temperature, speed, voltage, load and position parameters.
- Support angle limit: Limit according to the angle required by the equipment to prevent exceeding the angle blocking servo.
- Maximum torque limit: Limits the torque required by the equipment to prevent damage to the equipment by exceeding the torque.
- PID scale factor adjustment: adjustment of the motor motion hardness, static error compensation, overshoot and other states.
- Multiple servo series control: The servo body has 2 interfaces, which can realize the use of the upper and lower servos in series.
Specifications:
- Servo model: STS3025BL
- Dimensions: 40 x 20 x 40mm/1.6 x 0.8 x 1.6"
- Working voltage: 6-14V
- Operating temperature: -20°C to 60°C
- No-load speed: 0.059sec/60° (170RPM) at 12V
- No-load current: 380mA at 12V
- Stall current: 4400mA at 12V
- Stall torque: 20kg.cm at 12V
- Rotation angle: 360° (angle can be limited by software)
- Weight: 89±1g (0.2lb)
- Sensor: 12-bit magnetic encoder sensor
- Baud rate: 38400~1000000Bps
- Output shaft: 25T/OD5.9mm
- Position resolution: 360°/4096
- Control signal: TTL communication level
- KT constant: 4.5kg.cm/A
- Rated torque: 6.5kg.cm at 12V
- Protocol type: Half-duplex asynchronous serial communication
Attention:
(1) The above electronic characteristics are sampled in the 6V operating voltage state. For other electronic features, refer to the STS3025BL datasheet.
(2) Regarding kg.cm conversion N.m relationship: 1kg.cm is equal to approximately 0.1N.m
(3) Under the quiescent operating current, the STS3025BL serial servo servo is energized, but there is no movement.
(4) Under the condition of no-load current operation, the STS3025BL serial servo moves under the condition of no load.
(5) Under the condition of stall current, it is the current of the STS3025BL serial servo at the output of maximum torque.
(6) The baud rate can be modified to 1000K,500K,250K,128000,115200,76800,57600 and 38400.
(7) The actual maximum number of available bus nodes depends on the power supply capacity and the allowable current specification of the cable, and it is recommended that 8 sets of servos be equipped with one set of power supplies.
(8) The stall torque is the maximum stall torque of the servo, and 1/3-1/5 of this value is selected as the best working point for the actual working torque.
Development Environment:
- Can be developed in environments for Arduino/STM32/PC/JAVA/C++/C#
- Communication protocol, memory table, serial port debugging assistant and other information can be provided
Package Included:
- 1 x Servo
- 2 x Cables
- 19 x Screws
- 8 x Nuts
- 1 x User manual
- 1 x URT-1 debugger board
- 1 x USB cable
Note:
- Other items pictured are not included, for demonstration purposes only. Thank you for your understanding!












")

 w/ URT-1 Debugger Board")

 with URT-1 Debugger Board")