| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $88.49 | $86.69 | $83.98 | $80.37 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
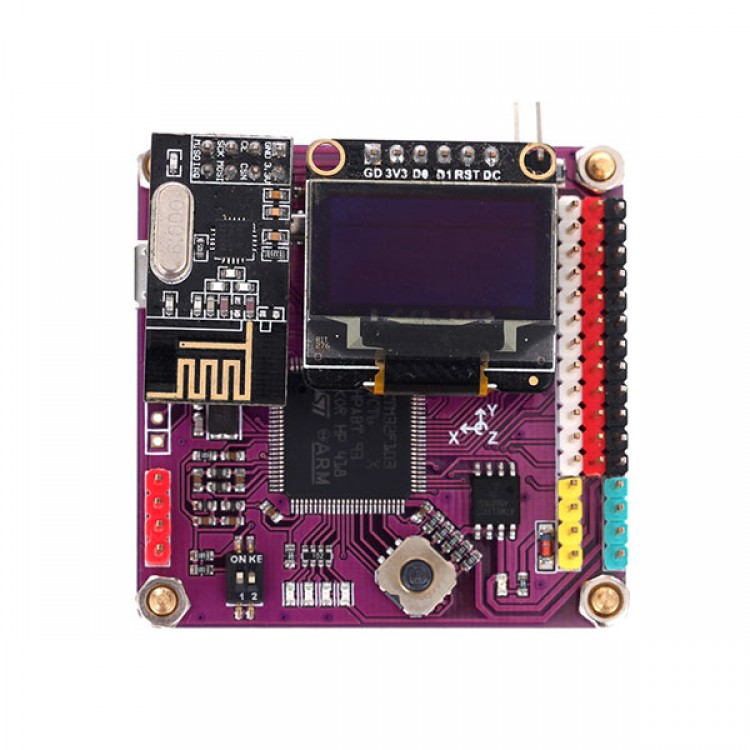
Flight Control Board STM32+MPU6050+HMC5883+MS5611 Serial PID Providing Source Code w/ OLED for Quadcopter
Flight control hardware:
- STM32F103VCT6+MPU6050+HMC5883L+MS5611+CP2102+AT45DB161 (already download programme in it)
- Dimension: 53mm*53mm
- Hole pitch: 47.5mm*48mm
- MPU-6050: three axis Gyroscopte+triaxial accelerometer
- HMC5883L: Three-axis magnetic sensor
- MS5611: Barometric altimeter
- STM32F103RB: 32-bit ARM CortexM3 processor operates at 72M clock
- CP2102 serial chip: directly communicate through date cable and PC
- Download interface: lead out STM32 serial SWD debug interface, 3V3, GND, SWCLK,SWDIO, can use download/emulator like STlink or Jlink
- Power supply: 5V
- Gyroscope range: ±250 500 1000 2000 °/s
- Accelerometer range: ±2±4±8±16g
- Frequency of attitude data reading reaches at 1000Hz, Frequency of quaternion attitude algorithm reaches at 500Hz
- Working current: about 40mA at 5V
- 4 Blue luminous diode, convenient for debugging
- High efficiency, multi sound piezoelectric buzzer
- 2MB FLASH
- PCB adopts Zedoary processing methold, not easy to oxidation
- Purple color more charming
- Ten years of old factory processing experience, guarantee the quality
- All the machine is STM produced, high reflow soldering processing
Reserved interface:
- Serial port
- 12*PWM IN (receiver)
- 12*PWM OUT(ESC, Servo)
- GPS satellite input support
- PPM input signal support
- SWD debug
- NRF data transmission
- 12C
- SPI
- ADC battery voltage
- USB interface
- OLED module interface
Source code:
- MPU6050 driver
- Quaternion attitude algorithm procedures
- High precision barometer MS5611 driver and high precision calculating
- High stablized compass MHC5883L driver and compass calculating
- Four road hardware PWM ESC driving
- 4 road hardware receiver driving
- OLED display driving
- Serial PID
Package includes:
- Flight control board x 1
- OLED x 1










 for Quadcopter")
 for Quadcopter")
