| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $17.71 | $17.35 | $16.81 | $16.08 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
KKmulticontroller V5.5 Controller Board V2.2 Program
Features:
- Simple structure, Easy to Maintain and Debug Control
- With 3 pcs gyros, relying on potentiometer adjust gyro sensitivity.
- Full servo signal output, support normal ESC / analog servo
- Support for single-axis / UFO, Y3 3-axis, Y4-type 3-axis, 4 axis, 6 axis, V22 flight mode
- Supports 4-axis "+" and "X" flight mode, support for six-axis "HEXA6" and "Y6" flight mode.
- Don't need MK 4-axis PPM decoder board, the receiver can be connected directly to the Transmitter
Package included:
- 1 x 4-axis Circuit Board
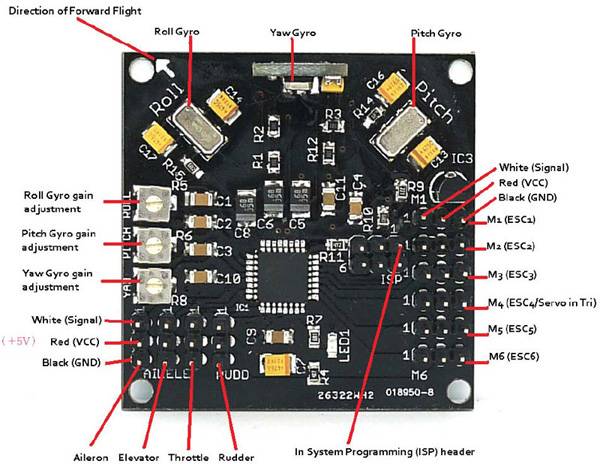
The KKmulticontroller is a flight control board for remote control multicopters with 2,3,4 and 6 rotors. We get it to stablise the aircraft during flight. It takes the signal from the three gyros on the board (roll, pitch and yaw) and feeds the information into the Integrated Circuit (Atmega IC). This then processes the information according the the KK software and sends out a control signal to the Electronic Speed Controllers (ESCs) which are plugged onto the board and also connected to the motors. Depending upon the signal from the IC the ESCs will either speed up or slow down the motors (and tilt the rear rotor with a servo in a Tricopter) in order to establish level flight.
The board of kkmulticontroller also takes a control signal from the Remote Control Receiver (RX) and feeds this into the IC via the aileron, elevator, throttle and rudder pins on the board. After processing this information, the IC will then send out a signal to the motors (Via the M1 to M6 pins on the board) to speed up or slow down to achieve controlled flight (up, down, backwards, forwards, left, right, yaw) on the command from the RC Pilot sent via his Transmitter (TX). In the case of a Tricopter, one of the pin connectors (M4) will control a servo to achieve yaw authority.
The v.5.5 has an Atmega168 chip on board and an ISP header which gives users the option to tweak and upload their own controller code.
also we supply config, you can get it at the link below,
http://www.goodluckbuy.com/kkmulticontroller-v5-5-controller-board-v2-1-program-with-config-quadcopter-.html
Connection Digram
Tags: kkmulticontroller







")


")

