Attention:
- This product is an open-source project. Our company mainly provides hardware assembly services for the leader arm. Before delivery, we will ensure the hardware is intact and provide technical support related to the hardware.
- FACTR does not have simulation capabilities. If simulation functions are required, it is recommended to choose Gello. Other matters, such as integration with the leader arm, gravity compensation verification, and code verification, need to be completed by the user.
- No warranty is provided for open-source projects. For joint wear and structural damage caused by long-term use, users need to purchase corresponding replacement parts.
- Please read the relevant open-source materials carefully before purchasing, and confirm that the product meets your needs before placing an order.
- Documentation: https://jasonjzliu.com/factr/
Description:
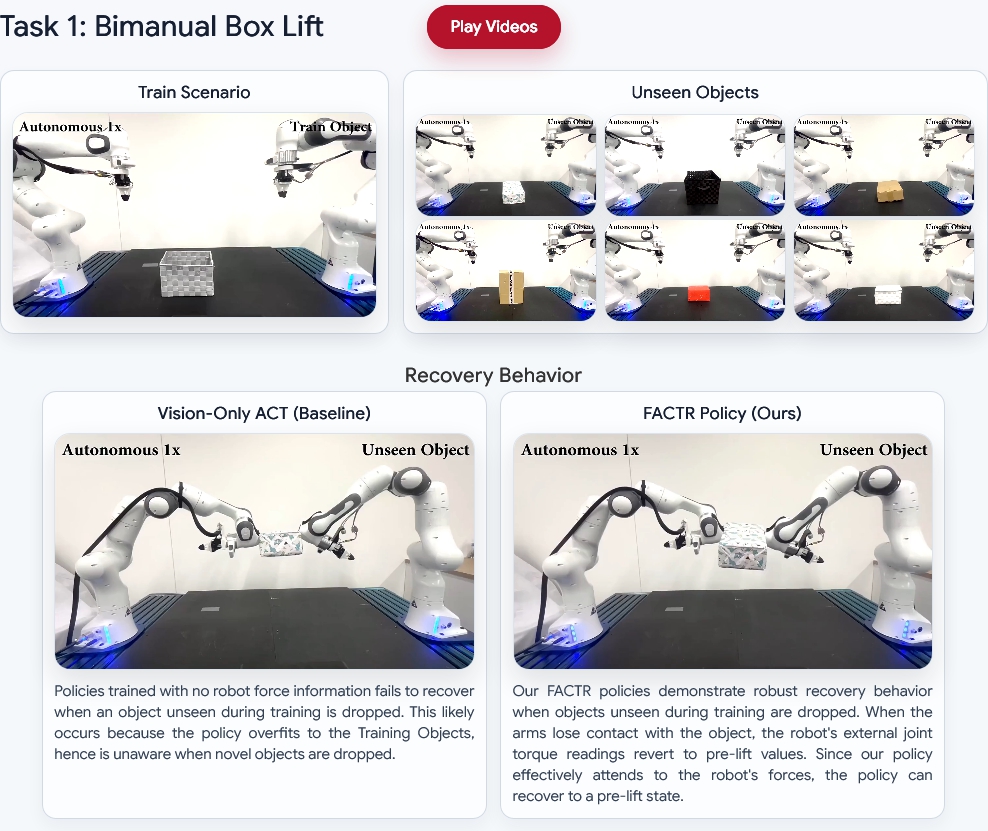
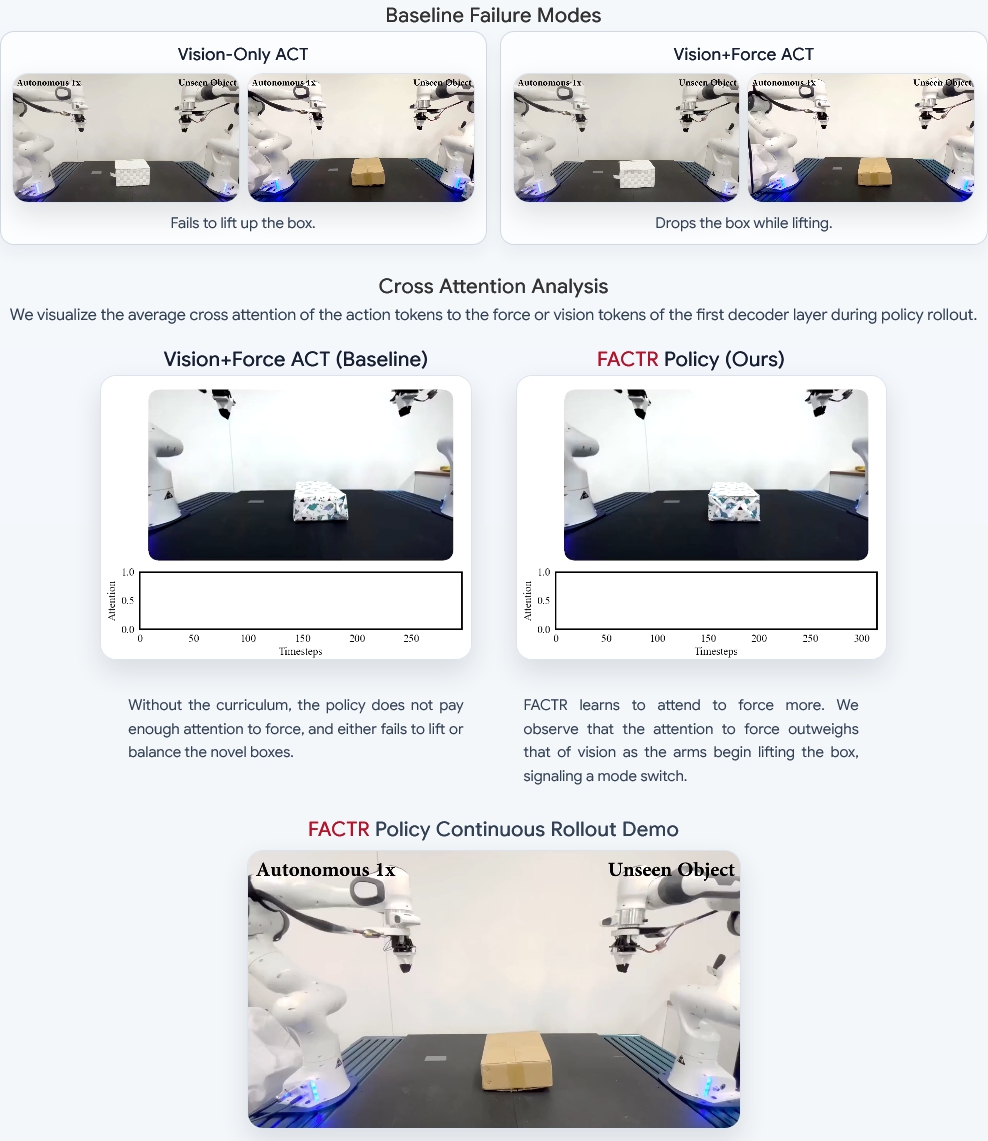
Many contact-rich tasks humans perform, such as box pickup or rolling dough, rely on force feedback for reliable execution. However, this force information, which is readily available in most robot arms, is not commonly used in teleoperation and policy learning. Consequently, robot behavior is often limited to quasi-static kinematic tasks that do not require intricate force-feedback. In this paper, we first present a low-cost, intuitive, bilateral teleoperation setup that relays external forces of the follower arm back to the teacher arm, facilitating data collection for complex, contact-rich tasks. We then introduce FACTR, a policy learning method that employs a curriculum which corrupts the visual input with decreasing intensity throughout training. The curriculum prevents our transformer-based policy from over-fitting to the visual input and guides the policy to properly attend to the force modality. We demonstrate that by fully utilizing the force information, our method significantly improves generalization to unseen objects by 43% compared to baseline approaches without a curriculum.
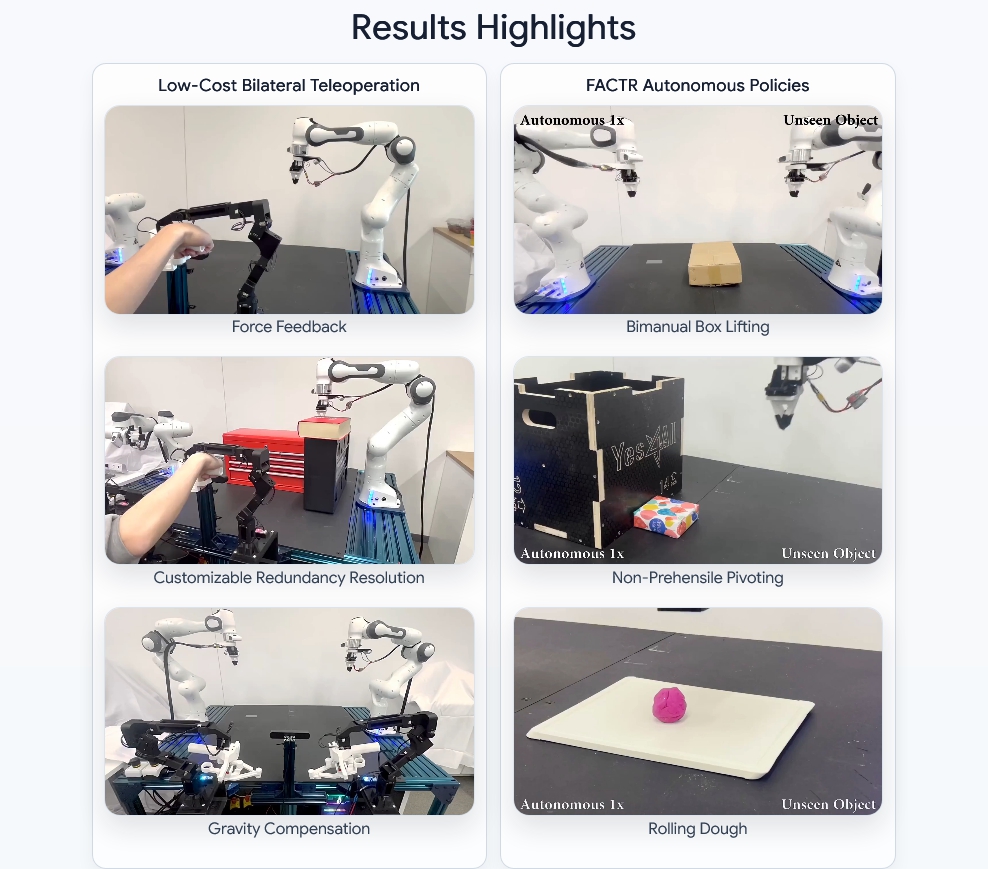
Results Highlights:
- Force Feedback
- Customizable Redundancy Resolution
- Gravity Compensation
- Bimanual Box Lifting
- Non-Prehensile Pivoting
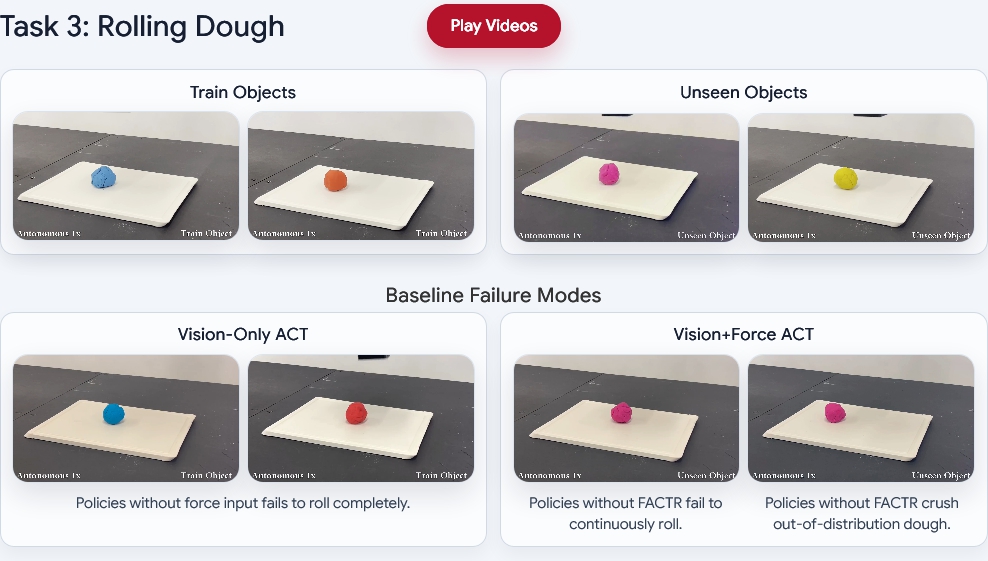
- Rolling Dough
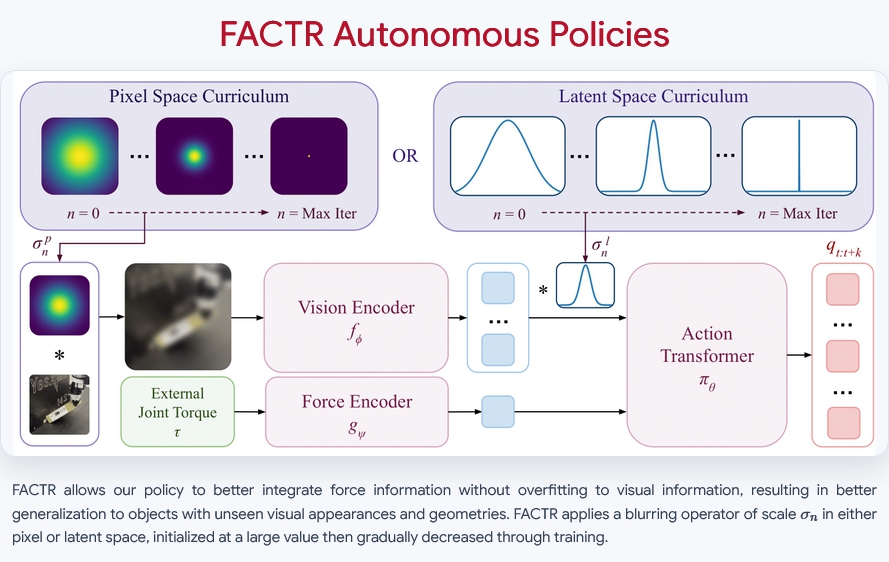
FACTR Autonomous Policies:
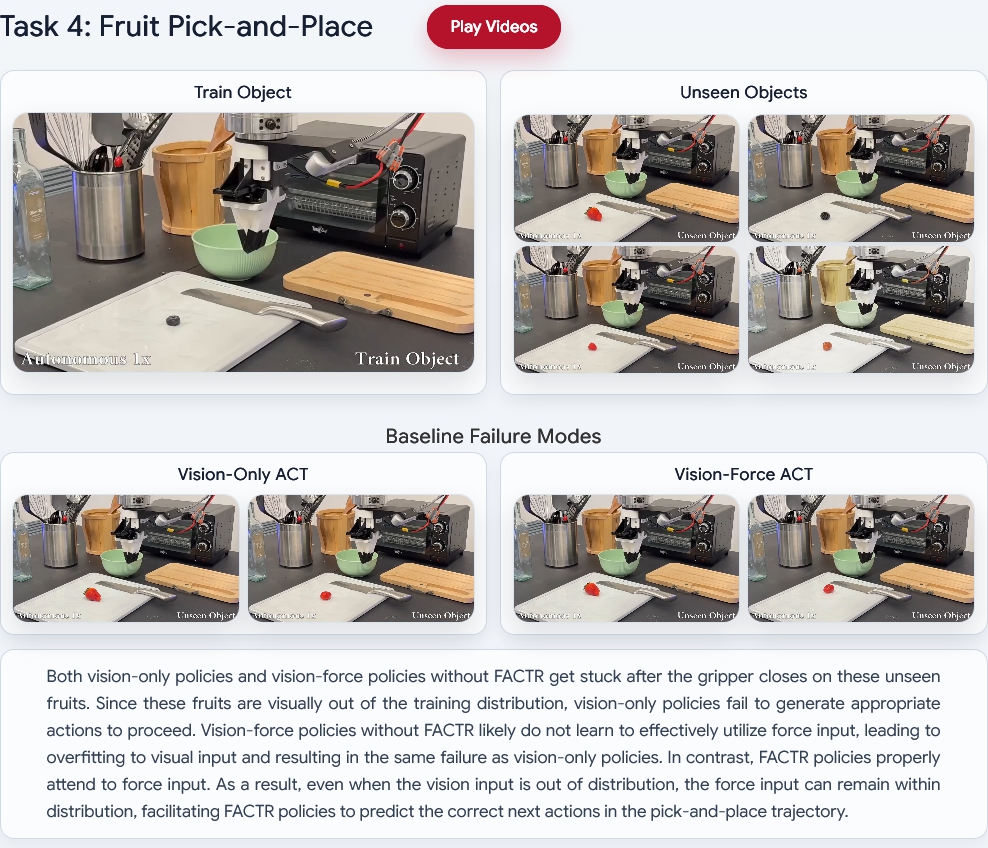
- FACTR allows our policy to better integrate force information without over-fitting to visual information, resulting in better generalization to objects with unseen visual appearances and geometries. FACTR applies a blurring operator of scale σn in either pixel or latent space, initialized at a large value then gradually decreased through training.
Feature:
Force Feedback
- The follower arm relays its contact forces in the form of external joint torques back to the leader arm.
- Force feedback allows the user to feel the geometric constraints of the environment through the leader arm.
Customizable Redundancy Resolution
- For 7-DOF manipulators, an unregulated joint-space causes the arm to drift into undesirable configurations under the influence of gravity during teleoperation due to kinematic redundancy. We leverage a null-space projection control law that allows us to resolve kinematic redundancy at any user-defined Rest posture configurations. Note that this control law, by construction, does not impose additional end-effector wrenches regardless of the arm's configuration.
Gravity Compensation
- We implement active gravity compensation for the leader arms, allowing them to remain suspended motionless in mid-air at any joint configuration. This enables the user to pause or stop teleoperation at any time and freely release the leader arms, which is especially beneficial for bimanual teleoperation.
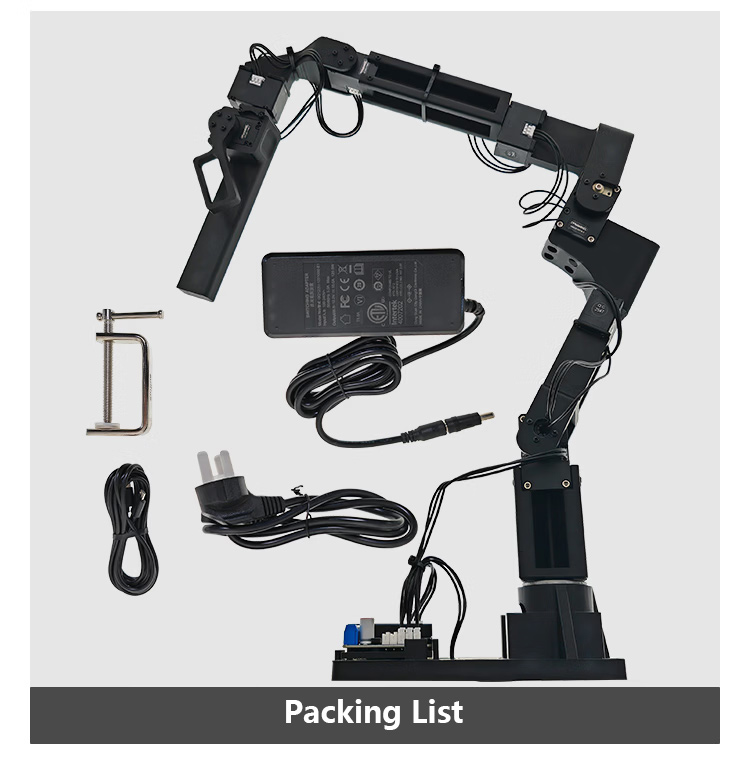
Product Configuration:
* XM430-W210-T Servo x 2
* XC330-T288-T Servo x 6
* HN12-I101 Auxiliary Servo Horn x 2
* ZNJ U2D2 Converter x 1
* ZNJ U2D2 PHB Power Supply Board x 1
* 12V 10A Power Adapter x 1
* FPX330-S102 4Pcs Structural Components x 1
* Full Set of 3D Printed Parts (Black) x 1
* Screw, Nut and Other Connector Kit x 1
XM430-W210-T Joint Motor:
- XM series for DYNAMIXEL is based on high-performance current sensing algorithms and provides multiple control technologies. It adopts an aluminum housing and new technologies such as hollow cable fastening structure for user convenience.
- 6 operation modes (Torque Control, Speed Control, Position Control, Extended Position Control, Current-based Position Control, PWM Control)
- Profile control for smooth motion planning
- Improved heat sink with aluminum housing
- Hollow rear cover design to minimize cable stress (3-channel wiring)
- Simple structure for easy assembly
- Energy-efficient (current reduced from 100mA to 40mA)
- 31% smaller volume compared to MX-28
XM430-W210-T Specifications:
- Product: XM430-W210-T (3pin)
- Motor: Coreless Motor
- Resolution: 4096 [pulse/rev]
- Operation Mode: Speed Control Mode, Position Control Mode (0 ~ 360 [°]), Extended Position Control Mode (Multi-turn), PWM Control Mode (Voltage Control Mode)
- Weight: 82 [g]
- Dimensions (W x H x D): 28.5 x 46.5 x 34 [mm]
- Reduction Ratio: 212.6:1
- Stall Torque: 2.7 [N.m] (at 11.1 [V], 2.1 [A]), 3.0 [N.m] (at 12.0 [V], 2.3 [A]), 3.7 [N.m] (at 14.8 [V], 2.7 [A])
- No-load Speed: 70 [rev/min] (at 11.1 [V]), 77 [rev/min] (at 12.0 [V]), 95 [rev/min] (at 14.8 [V])
- Operating Temperature: -5 ~ +80 [°C]
- Input Voltage: 10.0 ~ 14.8 [V] (Recommended: 12.0 [V])
- Communication Signal: TTL Level Multi-drop Bus
- Housing Material: Metal (Front, Middle), Engineering Plastic (Back)
- Gear Material: Metal
- Standby Current: 40 [mA]
XC330-T288-T Joint Motor:
- The XC330 series is an upgraded version of the XL330 series. It uses metal gears and bearings to enhance durability.
- Multiple operation modes: Speed Control, Position Control, Extended Position Control, PWM Control, Current Control, Current-based Position Control
- Profile control for smooth motion planning
- Input voltage: 6.5V~12V (recommended 11.1V)
- Enhanced durability with metal gears and bearings
- Supports RC protocol without additional conversion devices
- Reduced current for energy efficiency
XC330-T288-T Specifications:
- Product: XC330-T288-T
- Motor: Coreless DC Motor
- Resolution: 4096 [pulse/rev]
- Operation Mode: Current Control Mode, Speed Control Mode, Position Control Mode (0 ~ 360 [°]), Extended Position Control Mode (Multi-turn), Current-based Position Control Mode, PWM Control Mode (Voltage Control Mode)
- Weight: 23 [g]
- Dimensions (W x H x D): 20.0 x 34.0 x 26.0 [mm]
- Reduction Ratio: 288.35:1
- Stall Torque: 0.76 [N.m] (at 9.0 [V], 0.61 [A]), 0.92 [N.m] (at 11.1 [V], 0.80 [A]), 1.00 [N.m] (at 12.0 [V], 0.88 [A])
- No-load Speed: 52 [rev/min] (at 9.0 [V]), 65 [rev/min] (at 11.1 [V]), 71 [rev/min] (at 12.0 [V])
- Operating Temperature: -5 ~ +70 [°C]
- Input Voltage: 6.5 ~ 12.0 [V] (Recommended: 11.1 [V])
- Housing Material: Engineering Plastic
- Gear Material: All-metal Gear
- Standby Current: 17 [mA]
Packing List:
- 1 x Set of Assembled Robotic Arm
Packaging Details:
- Volume weight: 2.8kg