Description:
Dexterous manipulation has been a
long-standing challenge in robotics. While machine learning techniques
have shown some promise, results have largely been currently limited to
simulation. This can be mostly attributed to the lack of suitable
hardware. In this paper, we present LEAP Hand, a low-cost dexterous and
anthropomorphic hand for machine learning research. In contrast to
previous hands, LEAP Hand has a novel kinematic structure that allows
maximal dexterity regardless of finger pose. LEAP Hand is low-cost and
can be assembled in 4 hours from readily available parts. It is capable
of consistently exerting large torques over long durations of time. We
show that LEAP Hand can be used to perform several manipulation tasks in
the real world—from visual teleoperation to learning from passive video
data and sim2real.
Features:
* Kinematics and
Dexterity: LEAP hand demonstrates side to side dexterity in both the
finger up and finger down configuration. This is thanks to its universal
abduction-adduction mechanism. LEAP Hand improves the opposition of the
thumb and fingers, which means it can grasp objects more easily.
*
Low Cost: LEAP Hand is low-cost and can be assembled in a few hours
using a 3D printer, off-the-shelf parts, and common hand tools.
* Strength: LEAP Hand is one of the strongest robotic hands available today.
* Robustness: LEAP Hand can accurately complete repeated motions without overheating
Human-like Versatility: LEAP Hand can grasp a wide variety of objects easily.
* Learning from Humans: LEAP Hand can learn to use joint-to-joint mappings or energy functions from human videos.
* Sim2Real Control: The URDF of LEAP Hand is highly accurate for all robotic hands and can be used in many RL frameworks.
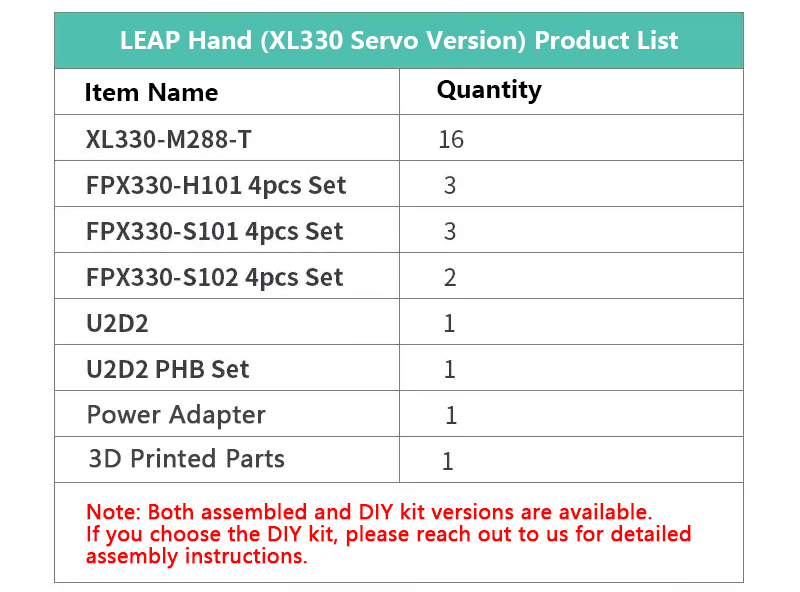
Optional XL330-M288-T Servo (for XL330 Version):
* Model Name: XL330-M288-T
* Microcontroller: CORTEX-M0+ (64 [MHz], 32Bit) for ARM
* Position Sensor: Non-contact Absolute Encoder (12Bit, 360 [°])
* Motor: Cored Motor
* Baud Rate: 9,600 [bps] ~ 4 [Mbps]
* Control Algorithm: PID control
* Resolution: 4096 [pulse/rev]
* Reduction Ratio: 288.4:1
* Stall Torque: 0.52 [N.m] (at 5.0 [V], 1.47 [A])
* No-load Speed: 103 [rev/min] (at 5.0 [V])
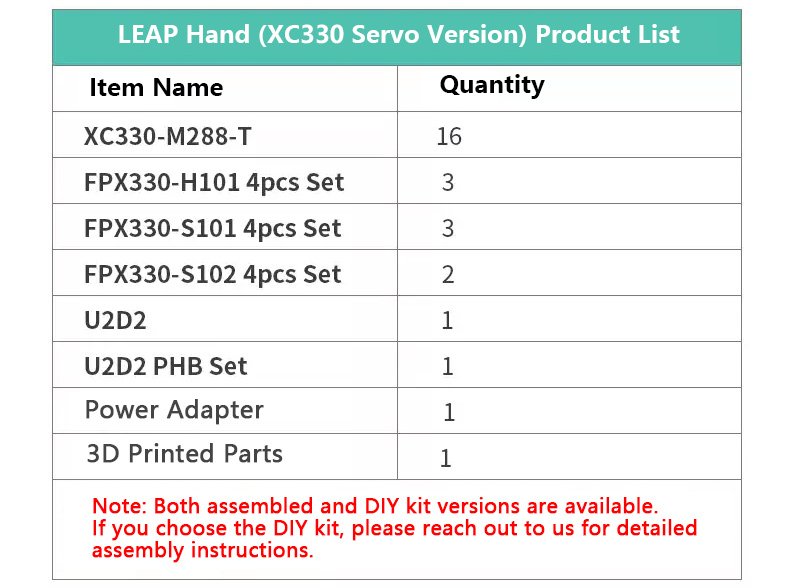
Optional XC330-M288-T Servo (for XC330 Version):
* Model Name: XC330-M288-T
* Microcontroller: CORTEX-M0+ (64 [MHz], 32Bit) for ARM
* Position Sensor: Non-contact Absolute Encoder (12Bit, 360 [°])
* Motor: Coreless DC Motor
* Baud Rate: 9,600 [bps] ~ 4 [Mbps]
* Control Algorithm: PID control
* Resolution: 4096 [pulse/rev]
* Reduction Ratio: 288.35:1
* Stall Torque: 0.93 [N.m] (at 5.0 [V], 1.80 [A])
* No-load Speed: 81 [rev/min] (at 5.0 [V])
Packing List:
* 1 x Set of Robotic Hand
Packaging Details:
* Package weight: 1kg
Attention:
* This product is an open-source project. Our
company mainly provides assembly services for the dexterous hand
hardware, ensuring the hardware is intact before shipment and providing
technical support related to the hardware.
* Leap hand has simulation
functions (refer to open-source materials). Other matters, such as
connection and communication with the robotic arm, code verification,
etc., need to be completed by the user.
* Open-source projects have
no warranty. For issues caused by long-term use, such as joint wear,
structural component damage, connecting wire detachment, rubber aging,
etc., the user needs to purchase corresponding products for replacement
or repair.
* Please read the relevant open-source materials carefully
before purchasing to confirm that the product meets your needs before
placing an order.
* This product is an open-source product. We
provide technical support for the hardware part. The subsequent data
learning, development and application of the product need to be
researched and used by customers themselves. Thank you for your
understanding!
* For more information: https://v1.leaphand.com/
Optional Versions:
* XL330 Fully Assembled (Left Hand)
* XL330 Fully Assembled (Right Hand)
* XL330 DIY Kit (Left Hand)
* XL330 DIY Kit (Right Hand)
* XC330 Fully Assembled (Left Hand)
* XC330 Fully Assembled (Right Hand)
* XC330 DIY Kit (Left Hand)
* XC330 DIY Kit (Right Hand)