| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $88.19 | $86.39 | $83.69 | $80.09 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
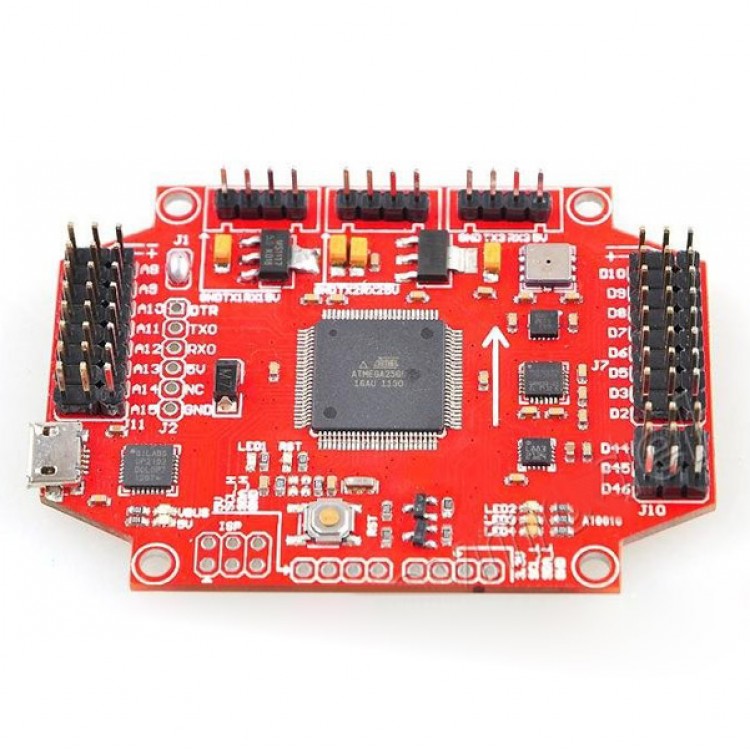
MWC Multiwii 4-axis X-mode Flight Control Board QUADX MultiWiiQuad ATMEGA2560
- MWC is MultiWii Copter abbreviation, this open source program's original author is a French program Alex Launched the MWC model series of flight control, so that multi-axis aircraft MWC fans can easily access the high cost of this product, through the MWC program to control the hardware platform, can achieve a variety of multi-spindle, high-quality flight results, flexibility can be adjusted into a very stable or very flexible to fit aerial, FPV or stunt flying and many different needs.
- With the same program for the open source compared to KK or ACM, MWC's more stable flight performance, flight skills required for novice lower debugging process more intuitive. Dedicated MWC GUI program can easily observe the PID parameters, flight control signal input / output status, sensor / switch-state, as well as aircraft attitude and heading sensor signal state of each group, sufficient for the initial configuration of the aircraft easier.
- Can be directly connected with the ports of GPS ( Ublox, MTK ), do not need UART - IIC adapter.
- Stable performance, with rich extended pins.
MultiWiiQuad Hardware configuration:
- ATMEGA2560 microcontroller
- ITG3205 three-axis digital gyroscope
- BMA180 triaxial accelerometer
- BMP085 pressure sensor
- HMC5883 axis magnetoresistive sensor (electronic compass)








")
")