| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $85.83 | $84.08 | $81.45 | $77.95 | Contact US |
RoboModule DC Servo Motor Driver RMDS-109 RS232 CAN Communications Interface No More Connection
Compared with 108, upgrades have been made in RMDS-109:
1. Its circuit board has been re-layout
2. For RS232 input and output, add 120R series resistor
3. For RS485 circuit, add 120R series resistor
4. Add 120R series resistor to buzzer circuit to reduce its sound
5. Optimize power supply design
6. Current sensor replaced
7. Optimize high current vias
How to Choose Multiplexing Functions:
Due
to the limitation of the number of interfaces, the driver's secondary
communication port shares a 2pin external interface. On the back of the
circuit board, 6 pads are left for users to choose which multiplexing
function to enable.
The above multiple function options include: 485A/485B, CTL1/CTL2, ASIN/DSIN, no connection.
1.
If 485A/485B multiplexing function is selected, we will connect
485A/485B. You can use 485 communication, which means you have all the
functions of the previous version 101/103/106/106+. Please note that
this 485 communication is not for modbus protocol, nor can it be used
together with the device for modbus on the same 485 bus. It is also not
recommended to use 485.
2. If CTL1/CTL2 multiplexing function is
selected, we will connect to CTL1/CTL2. Then you can use TTL-level pulse
direction control position (PLC is not supported). The TTL level
PWM/PPM input controls the speed, current and other functions, which can
be used to directly access the model airplane remote control. CTL1/CTL2
can also be used as 2 tact switch input ports, and their status can be
read by CAN/RS232. That is, it has all the functions of the previous
version 102/107.
3. If ASIN/DSIN is selected, we will connect
ASIN/DSIN, and then we can use 0-5V or 0-10V analog input to control
speed, current, etc. ASIN can also be used as a 0-10V analog voltage
input port, and DSIN can also be used as a touch switch input port, and
its status can be read by CAN/RS232. That is, it has all the functions
of the previous version 104.
4. If only CAN communication or
RS232 communication is used, and other communication ports are not
needed, select No More Connection version.
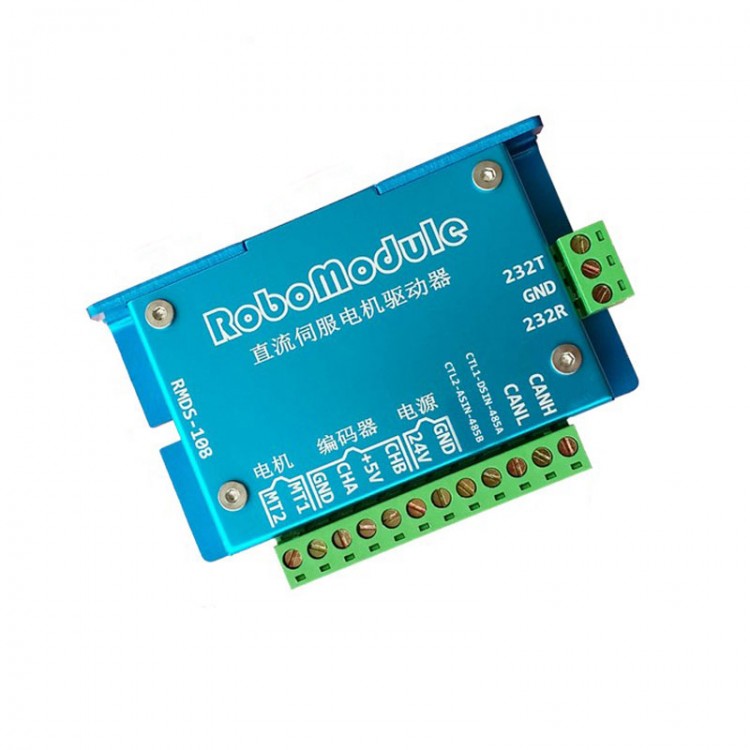
RMDS-109 Driver:
Mechanical parameters:
- Net weight: 125g
- Dimensions: 96*56*22.5mm
Voltage and current:
- Voltage support range: 7-33V
- Continuous current support: 10A
- Mosfet internal resistance: <4mΩ
- Mosfet withstand voltage: 60V
Communication Interface:
- RS232 debugging interface: √
- CAN bus interface: √
- RS485 bus interface: √
- Touch switch interface: 5V single-ended
- Pulse + direction input: 5V single-ended
- PWM/PPM signal input: 5V single-ended
- Analog input 0-5V/0-10V: √
Encoder:
- Encoder support type: 5V single-ended
Special function:
- Self-recovery after firmware upgrade failed: x
Download Materials Here:
http://www.robomodule.net/download.html
Precautions:
1.Download materials/instructions: www.robomodule.net, enter the download area, please read the instructions carefully before proceeding.
2. Please connect power supply correctly.
3.
When your motor is working, it is forbidden to cut off the power
directly! Otherwise, a very high power generation voltage may be
generated, which may burn the drive.
4. 232T, 232R, CANH, CANL, 485A, 485B, CTL1, CTL2, ASIN, DSIN, CHA, CHB and other signal interfaces
a. It is forbidden to go on the wiring, change the wiring, plug and unplug when the drive is energized
b. Please not directly touch the conductive frame
c. Prohibit direct contact with objects that may be charged with static electricity
d. It is forbidden to directly touch the strong power supply (12V/24V/36V/48V and motor wires, etc.)
Otherwise,
there is a high probability that the driver's interface will be
permanently damaged. Please confirm that the wiring is correct before
turning on the power.
5.When using, it is best to use battery power directly (without any conversion) (battery is not included).
Package Included:
- 1 x Servo Motor Driver
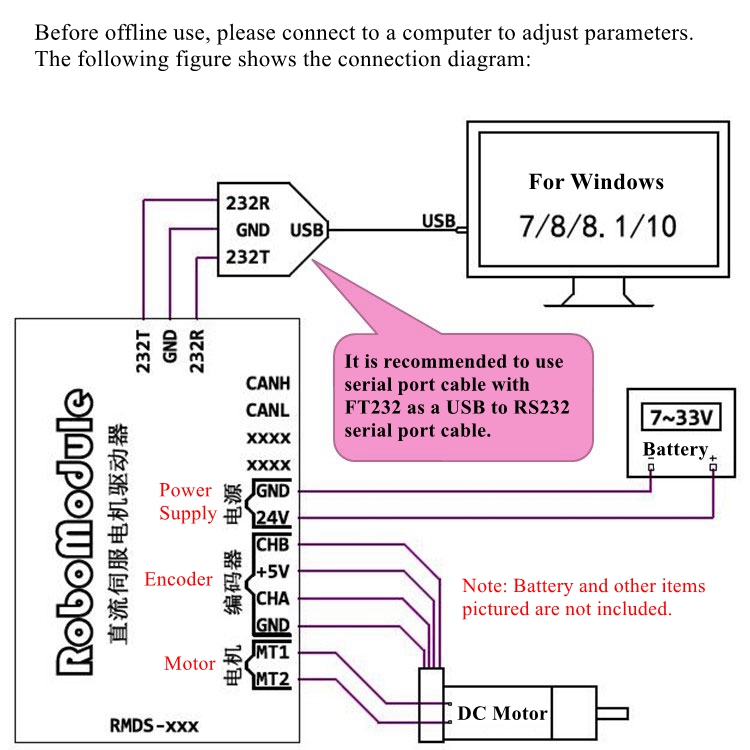
Note:
-
Battery and other items pictured are not included in the package, for
demonstration purposes only. Thank you for your understanding!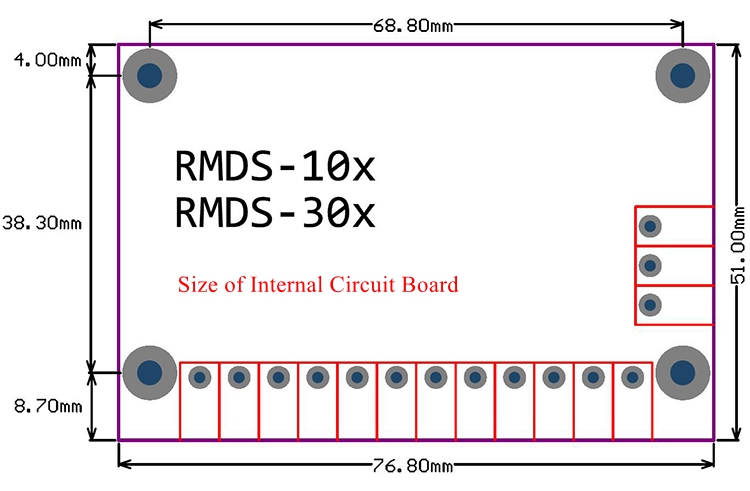
Attention:
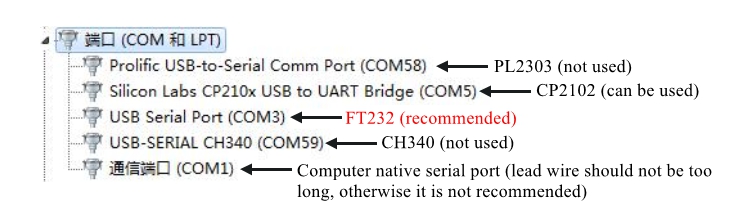
· The drive is connected to your computer for debugging and setting, and only the RS232 port can be used.
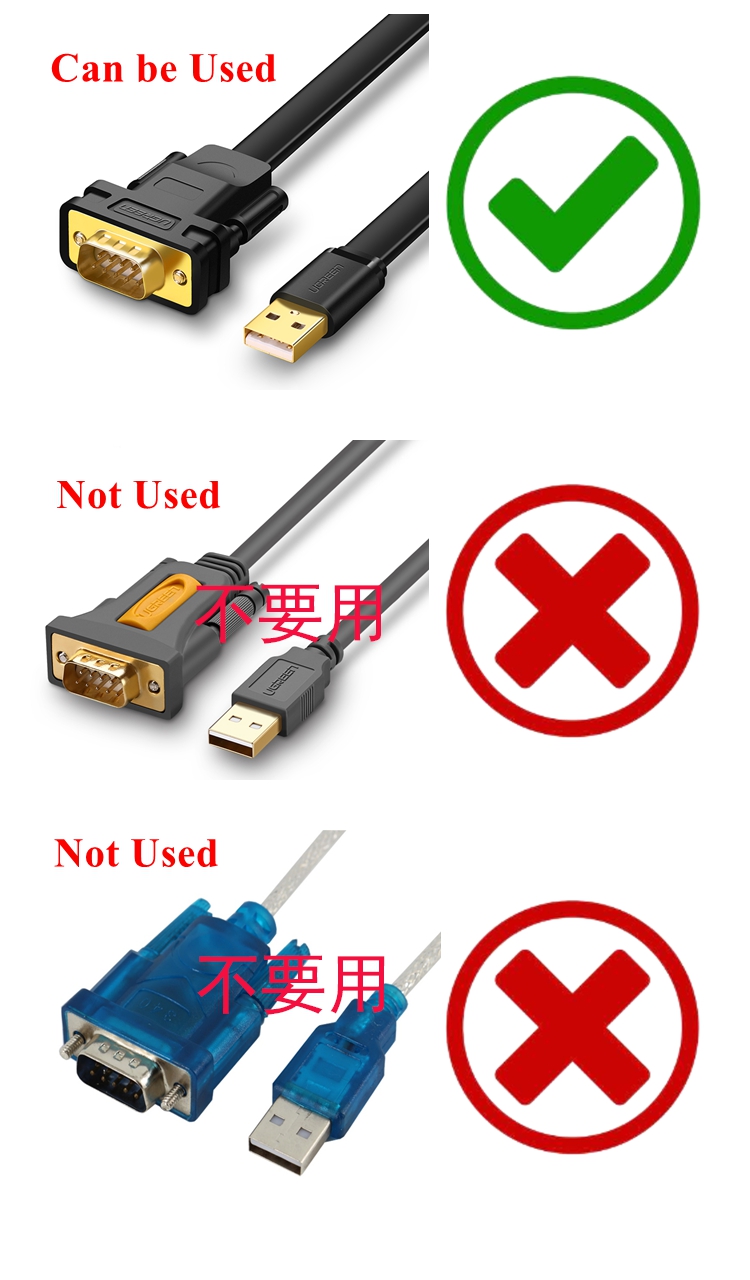
· It is recommended to use a USB to RS232 serial cable, and the FT232 chip version is recommended.
·
It is forbidden to use a CH340 serial line. The CH340 serial line does
not meet the level standard specified by RS232. It is only reversed on
the basis of TTL and cannot be guaranteed.
Normal communication.
Using it may also cause the debugging software to crash, and frequent
errors in data transmission and reception, so it is prohibited to use
it.
· It is forbidden to use the PL2303 (Prolific) serial cable. The
serial chip of PL2303 is unstable, and a large amount of wrong data may
appear after working for a long time, which may cause the debugging
software to freeze frequently, and it may also cause a blue screen of
the computer.
· If there is a serial cable, please insert the
computer USB port in advance and check its type in the device manager.
The different serial lines are displayed as follows in the device
manager: