| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $749.56 | $734.27 | $711.32 | $680.73 | Contact US |
 Hiwonder DaDa:bit AI Programmable Blocks Educational Robot (without Micro:bit Mainboard) for DIY
$124.34
Hiwonder DaDa:bit AI Programmable Blocks Educational Robot (without Micro:bit Mainboard) for DIY
$124.34
 Hiwonder Qtruck Robot Car Kit Tracked Line-Following & Transport + 3DOF Robot Arm without Micro:bit
$104.18
Hiwonder Qtruck Robot Car Kit Tracked Line-Following & Transport + 3DOF Robot Arm without Micro:bit
$104.18
 Hiwonder uHand UNO Bionic Hand (Advanced Version Right Hand + Sensor Pack + Motion Sensing Glove)
$299.99
Hiwonder uHand UNO Bionic Hand (Advanced Version Right Hand + Sensor Pack + Motion Sensing Glove)
$299.99
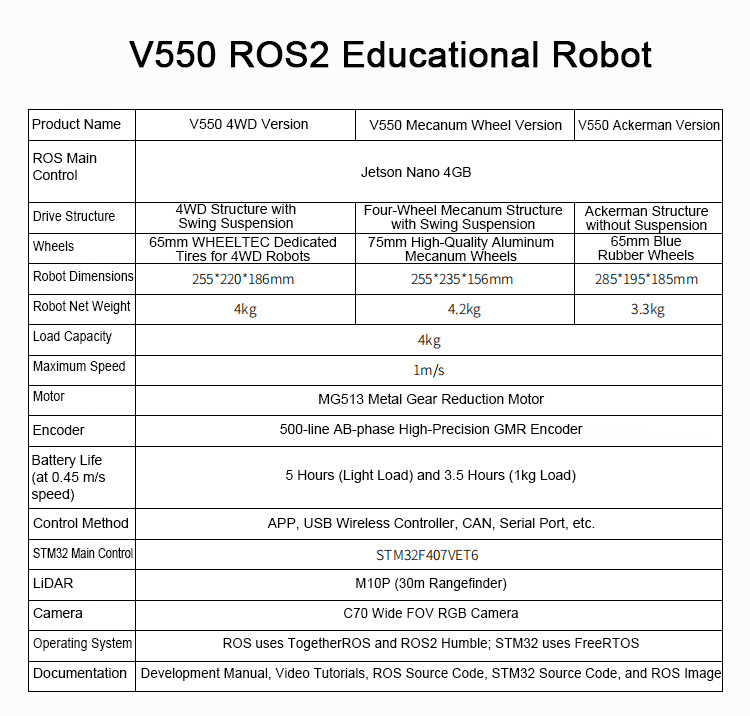
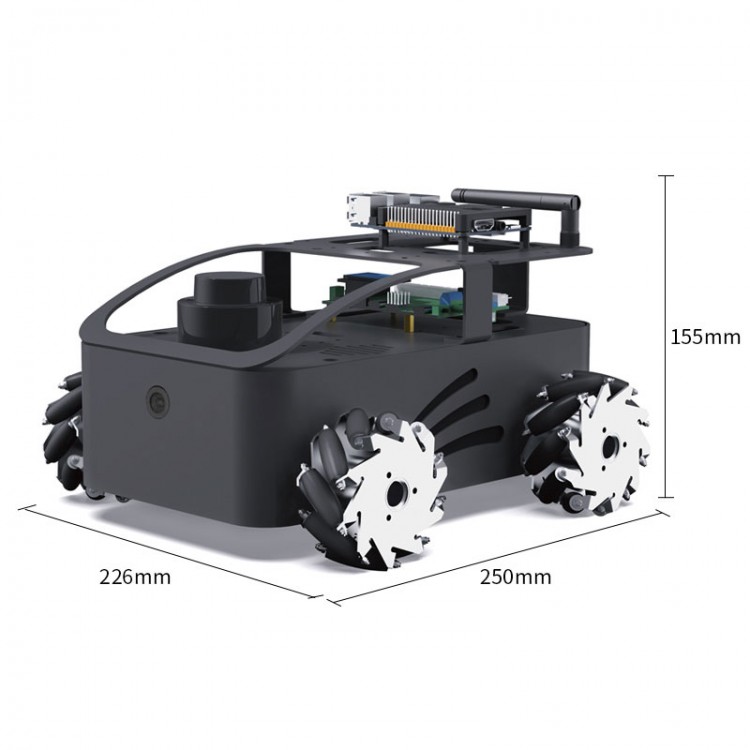
V550 ROS2 Robot Educational Robot (Mecanum Wheels) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
Description:
The V550 ROS2 Educational Robot is an entry-level product, designed specifically for ROS educational scenarios. It integrates multiple patented technologies and achieves a balance between minimalist design and ease of development through our mature industrial design. Leveraging the controller's powerful AI capabilities, combined with a fully upgraded TOF LiDAR and RGB camera, the V550 meets the demands of advanced learning in ROS, AI, and related fields.
Features:
WHEELTEC V550 ROS2 Educational Robot
* With artistic industrial design shell
* Full support for ROS2
* Video tutorial with over 16G code level
* Provides melodic mirror
* Provides humble mirror
* The bottom layer is equipped with FreeRTOS
* For Jetpack6
* For Tensorflow
* For Pytorch
* Upgrade TOF radar
* Supports robot formation
* Deep skeleton recognition
* GMR encoder
* Attractive metal enclosure
* Textbook Level Development Manual
* Source code level video tutorial
* Provides technical support
Simple and User-Friendly Industrial Design
* Research robots need to meet requirements such as attractive appearance and ease of use. The V550 features an enclosed sheet metal design on the bottom, providing better protection for lower-frequency development components like high-power batteries and motors, fundamentally eliminating safety hazards. The upper part uses a streamlined bracket layout that accommodates the lidar, ROS main controller, STM32 drive-control integrated board, etc., making plug-and-play operations and debugging more convenient.
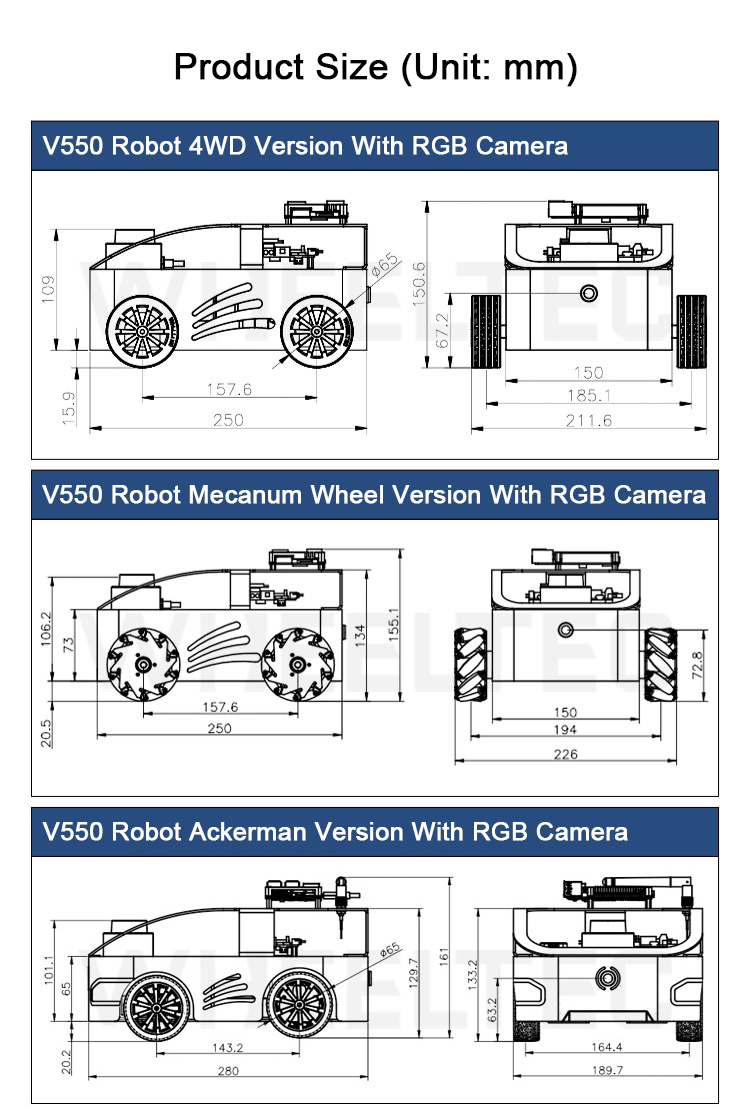
Multiple Chassis Structures Available
* We have launched three different chassis options: Ackerman version, Mecanum wheel version, and 4WD version, to meet the needs of various application scenarios.
Support for Multiple ROS1/ROS2 Systems
* When you purchase our robot, we provide system images for ROS1 Melodic, ROS1 Noetic, ROS2 Galactic, and ROS2 Humble.
WHEELTEC Provides a Wealth of ROS2 Video Tutorials and Continuous Updates, Making Learning Easy for Users
1. ROS2 Beginner Tutorials:
* Overview of ROS2
* ROS2 Architecture Framework
* Introduction to ROS2 Communication Mechanism
* ROS2 Command Line Tools
* RVIZ2 Data Visualization Tool
* RQT Toolbox
* ros2bag Tool
* ROS2 Topic Communication Publisher in C++
* ROS2 Topic Communication Subscriber in C++
* ROS2 Topic Communication in Python
* Using Other ROS2 Communication Types
* ROS2 Launch File Management Tool
* ROS2 TF2 Coordinate Transformations
* ROS2 URDF Model
2. ROS2 Functional Tutorials:
* Getting Started with ROS2 Robots
* ROS2 Keyboard Control
* ROS2 Gmapping Mapping
* ROS2 SLAM-Toolbox Mapping
* ROS2 Cartographer Mapping
* ROS2 2D Navigation
* ROS2 Lidar Following
* ROS2 Visual Line Following
* ROS2 Visual Object Following
* ROS2 Web Browser Monitoring
* ROS2 USB Gamepad Control
* ROS2 KCF Object Following
* ROS2 Multi-Robot Formation Control
* ROS2 QT Interface Interactive Control
* Sound Source Localization and Voice Navigation
* ORB Visual SLAM Functionality
ROS2 System
* The goal of ROS2 is to become an operating system suitable for the majority of robots. Currently, almost all newly launched robotic projects by companies are directly based on ROS2.
* Compared to ROS1, ROS2 cancels the MASTER node management at the application layer, and enhances real-time communication at the middleware layer by adopting DDS (Data Distribution Service). At the system layer, ROS2 adds support for Windows, Mac, and microcontrollers.
* Supports for multi-robot systems
* Cross-platform system support
* Real-time control capability
* Supports microcontroller
High-Quality Lithium Battery with Protective Casing
* Most smart robotic vehicles on the market use simple lithium battery packs wrapped in rubber, which have poor safety performance and are unattractive. Leveraging its scale advantage, WHEELTEC mass-produces lithium batteries with protective casings according to commercial robot standards. The batteries are equipped with built-in protections such as short-circuit, overcharge, and over-discharge safeguards, greatly enhancing safety.
Advantages of the Lithium Battery Compared to Polymer Batteries
* 18650 battery cells are equipped with built-in explosion-proof valves. When internal pressure becomes too high, the valve will pop out and the fuse at the top will melt to release the pressure. In contrast, polymer batteries will continue to expand and swell under high pressure, posing risks of rupture and explosion.
* The 18650 batteries can endure over 800 charge and discharge cycles with only a 20% capacity loss, giving them a theoretical service life of more than 3 years.
Innovative Mecanum Wheel Chassis Technology
* All chassis are fully machined from metal.
* The Mecanum wheels are made of metal, offering a significant improvement in precision and lifespan compared to typical plastic Mecanum wheels. The chassis is also equipped with a high-precision suspension system, usually found only in premium chassis, allowing it to adapt to uneven terrain.
* Featuring metal Mecanum wheels and a swing suspension system.
* In addition, the Mecanum wheel chassis has been fully upgraded with a clamp-style coupling, so you'll never have to worry about the wheels falling off again!
High-Precision GMR Encoder
* The newly upgraded 500-line AB-phase GMR high-precision encoder offers precision more than 38 times greater than Hall encoders (most similar products on the market use Hall encoders). Robots equipped with the GMR high-precision encoder perform exceptionally well in low-speed navigation.
* Encoder Type: GMR (Giant Magneto-resistive)
* Rated Torque: 1 kg.cm
* Stall Torque: 4.5 kg.cm
* Gear Ratio: 1:30
* Rated Current: 360 mA
* Stall Current: 3.2 A
* Rated Voltage: 12 V
* Rated Power: 4.32 W
Proprietary Robot Swarm Control Algorithm
* By combining leader-follower algorithms with our company's innovative algorithms, we achieve highly stable robot swarm (formation) control. This technology has already been widely deployed across major universities in China. Robot formation control requires at least three robots to operate successfully.
Supports Bluetooth Wireless Code Programming
* The Bluetooth module provided with the robot chassis not only allows for remote debugging of the robot but also supports the use of the dedicated Bluetooth programming host developed by WHEELTEC for code flashing. The entire flashing process takes only a few seconds, greatly facilitating secondary development.
Core Features List:
A. Basic Robot Functions:
* Serial communication with ROS at the low level
* Reserved CAN communication interface
* IMU and odometry data feedback
* Battery voltage monitoring and voltage alarm
* Support for one-click serial download
* Gyroscope zero drift calibration
* Kinematic analysis of the robot chassis in various scenarios
* Remote control via model aircraft transmitter
* Common circuit protection functions
* Automatic recharging with infrared signal docking
* Chassis odometry correction
B. Mapping and Navigation Functions:
* URDF model for all vehicle models
* Dynamic obstacle avoidance for the robot
* Point-to-point navigation
* Multi-point navigation
* Global path planning algorithms
* DWB/MPPI/RPP path planning
* Path recording and tracking reproduction
* LiDAR angular shielding
* LiDAR-based mapping and navigation
* RTAB vision + LiDAR mapping and navigation
* Gmapping mapping
* Cartographer mapping
* Slam_toolbox mapping
* RRT-based autonomous mapping
* NAV2 parameter optimization
* Robot formation (Leader-Follower algorithm)
* Robot formation switching
* Robot formation obstacle avoidance
* Automatic recharging station calibration and navigation
C. Human-Robot Interaction Functions:
* Keyboard node control
* APP Bluetooth remote control
* APP gravity sensing control
* APP PID parameter adjustment
* LiDAR following
* ROS Qt functionality
D. Visual Processing Functions
* Web camera monitoring
* Depth vision following
* KCF tracking
* RGB vision line-following (with integrated radar obstacle avoidance)
* Human skeleton recognition
* Human skeleton following
* 3D vision posture control
* 3D vision mapping
* 3D vision navigation
* ORB vision-based mapping
E. Deep Learning Functions
* YOLO object recognition
* Deep learning model training
Key Features Introduction (Fully Open Source):
* RTABMAP Visual and Lidar 3D Mapping and Navigation: It supports pure visual mapping and navigation with RTAB, as well as lidar and visual fusion mapping and navigation.
* Classic 2D Lidar Mapping, Navigation, Obstacle Avoidance: ROS2 supports Gmapping, Cartographer, and slam_toolbox for mapping.
* ORB Visual Mapping: ORB-SLAM2 is an open-source visual SLAM framework that can compute the camera's pose in real-time while also performing sparse 3D reconstruction of the surrounding environment. In RGB-D mode, it provides real-world scale information.
* Graphical ROS QT Interface: You can deploy a QT graphical interface to enable one-click access to ROS functions, providing intuitive feedback on the robot's speed, battery status, etc.
* YOLO Object and Gesture Recognition: It uses common deep learning model libraries to recognize everyday objects.
* ROS_TensorFlow Object Detection: Based on TensorFlow, this feature enables recognition of common objects and handwritten digits.
* RRT Autonomous Exploration and Mapping: The robot autonomously completes exploration mapping, saves the map, and returns to the starting point using the RRT algorithm, without human control.
* Web Camera Monitoring: It allows direct viewing of the robot's camera feed through any PC browser, enabling quick deployment of remote monitoring.
* RGB Camera Line Following: The robot follows ground lines using an RGB camera, integrated with lidar for automatic obstacle avoidance during the line-following process.
* Lidar Following: The robot scans nearby obstacles with lidar and follows the nearest object.
* Lidar Angle Masking: Optimized through SDK to mask specific angles for all lidar devices.
* TEB and DWA Path Planning: We provide detailed video tutorials to help you learn navigation path planning from scratch through Python-based mini-games.
* DWB/MPPI/RPP Path Planning: We offer three pre-built controller plugins: DWB, MPPI, and RPP, for path tracking in various robot shapes and navigation scenarios.
* Full-Coverage Path Planning: It automatically generates path points to cover the entire designated area, enabling full-coverage path planning navigation.
* Robot Chassis Kinematic Analysis: We provide kinematic analysis for various commercially available robot chassis, including Ackerman, differential, tracked, Mecanum, omnidirectional wheels, and four-wheel drive.
* Control Board Protection Circuit: Industrial-grade four-layer board for more compliant electrical routing, thermistor for real-time temperature control monitoring, and current sampling for hardware protection against motor stall over-current.
* ROS APP for Mapping and Navigation: It supports controlling ROS functions via an app, enabling movement control, mapping, and navigation features.
* Powerful Parameter Tuning Control App: It is for Android and iOS, allowing app-based parameter tuning, gravity-sensing control, and waveform display.
Provides Source-Level Video and Documentation Tutorials:
Including but not limited to the following materials:
* Basic ROS Video Series
* Detailed Video on ROS SLAM Principles and Algorithms
* ROS Functional Development Code-Level Video Tutorials
* Basic ROS2 Learning Video Tutorials
* ROS2 Functional Development Code-Level Video Tutorials
* ROS2 Microphone Array Tutorial Video
* Deep Learning Tutorial for Autonomous Driving Sandbox Scenarios
* Moveit Robotic Arm Video Tutorial
* Kinematic Model for Wheeled Mobile Robots Video Tutorial
* STM32 Low-Level Source Code and ROS Communication Video Tutorial
* Autonomous Driving 3D Reconstruction Development Video Tutorial
* Basic Ubuntu Tutorials for ROS
C70 RGB Camera:
* Product: C70 RGB Camera with Metal Casing and Wide FOV
* Resolution: 720P
* Field of View (FOV): H64.5° × V50°
* Frame Rate: 25 FPS
* Sensor Type: CMOS
* Driver Type: Supports UVC. Plug-and-play without drivers
* Supported Systems: For Windows XP / Vista / 7 / 8 / 10, and Ubuntu
* Weight: 50 g
* Dimensions: 47 × 38 × 28.5 mm
Jetson Nano 4GB (ROS Main Controller):
* ROS Main Controller: Jetson Nano 4GB
* CPU: Quad-core Cortex-A57 (for ARM) 64-bit at 1.43 GHz
* GPU: 128-core Maxwell at 921 MHz
* Computing Power: 0.5 TOPS
* Memory: 4GB 64-bit LPDDR4 at 1600 MHz | 25.6 GB/s
* USB Ports: 4 × USB 3.0
* Video Input: MIPI CSI
* Video Output: 2*HDMI-compatible 2.0 / DP 1.2 / eDP 1.2 | 2*MIPI DSI
* Video Encoding: H.264/H.265 (4Kp30)
* Video Decoding: H.264/H.265 (4Kp60, 2*4Kp30)
* Onboard Storage: 64G MicroSD card
* Network Interface: Gigabit Ethernet / M.2 Key E
* GPIO Pins: 40
* Rated Power: 5W and 10W modes
* Power Input: 5V
* Supported System: For Ubuntu
LSLIDAR M10P Lidar:
* Model: M10P
* Measurement Radius: Up to 30 meters
* Scan Frequency: 12 Hz
* Sampling Rate: 20,000 Hz
* Output Data: Angle and Distance
* Angular Resolution: 0.22°
* Ambient Light Resistance: 100 kLux (suitable for outdoor use)
* Interface Type: Serial Port
* Motor Type: Brushless Motor
* 360° Scanning and Ranging: Supported
* LiDAR Principle: Time of Flight (ToF)
Battery Parameters:
* Battery Model: E351S
* Battery Name: 12V Safety Lithium Battery Pack
* Battery Capacity: 5100mAh
* Charging Current: Recommended 2A
* Maximum Continuous Discharge Current: 6A
* Maximum Peak Discharge Current: 15A
* Battery Charge/Discharge Connector: DC5.5-2.1 Female
* Cut-off Voltage: 9V
* Nominal Voltage: 10.8V
* Fully Charged Voltage: 12.6V
* Dimensions: 85.6*61.6*42mm
* Weight: 377g
* Battery Protection: Short-circuit, over-current, overcharge, and over-discharge protection. It supports charging while in use. Built-in safety valve.
Hardware List:
* LSLIDAR M10P Lidar with serial port
* Jetson Nano 4GB (ROS main controller)
* C70 RGB camera with wide FOV
* C30D STM32 main control board
* Bluetooth module
* OLED screen
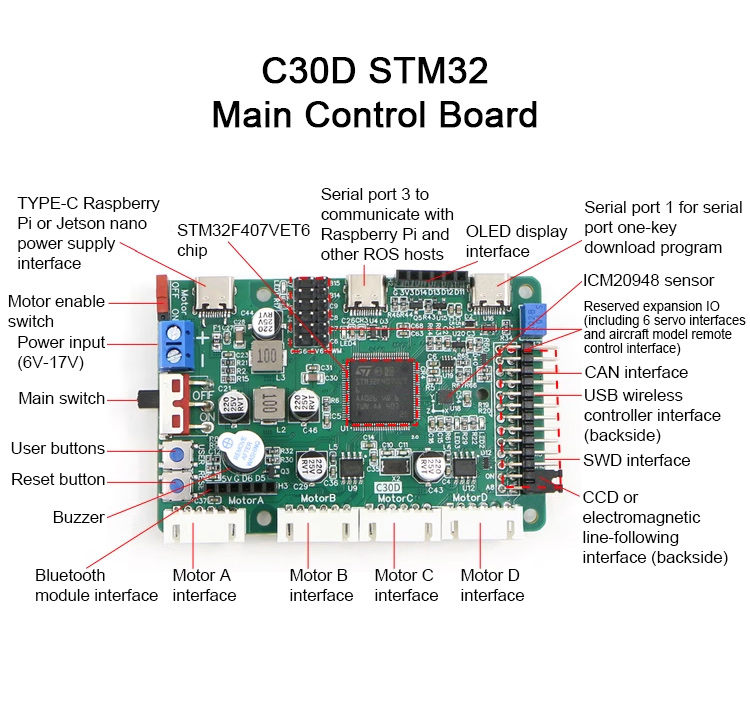
C30D STM32 Main Control Board:
* The motherboard is designed for smart robot cars and ROS development. One board can control multiple mainstream robot chassis types, including Ackerman, differential, Mecanum, omni-wheel, and tracked, with corresponding code provided. The motherboard can communicate with external devices via serial port or CAN and provides a 5V 5A interface to power devices like Raspberry Pi and Jetson Nano. Both the code and schematic are fully open-source.
Advantages of C30D STM32 Main Control Board:
* The carefully designed mini main control board matches the size and mounting holes of the Raspberry Pi.
* Main Control Chip: 100-pin STM32F407 with excellent expandability
* Remote Control Interface (for model aircraft): Supported
* Download Interface: Serial port one-click download or supports SWD interface download
* External Power Supply: Dual 5V 5A outputs
* Expansion Interfaces: CAN, CCD, electromagnetic line-following, etc.
* GPIO Reserved Pins: Dozens
* Reserved Servo Interfaces: 6 servo interfaces reserved (can connect a 6DOF robotic arm)
* Reserved Serial Ports: 4 serial ports
* Protection Circuit: Overheat protection, short-circuit protection, over-current protection
* Board Layers: Industrial-grade 4-layer board
Robot Configuration (Mecanum Wheel Version):
* 12V 30F MG513 Motor with GMR Encoder X4 (for Mecanum wheel version)
* 75mm High-Quality Aluminum Mecanum Wheel X4 (for Mecanum wheel version)
* 37 Motor Bracket X4 (for Mecanum wheel version)
* Metal Coupling X4
* Robot Shell and Bracket (1 Set)
* STM32 Main Control Board X1
* Bluetooth Module X1
* ROS Main Controller X1
* Lidar X1
* C70 RGB Camera X1
* 64GB High-Speed SD Card and Card Reader X1
* 12V 5100mAh Safety Lithium Battery X1
* 12.6V Fast Charger with 3C Certification X1
* OLED Display X1
* Programming Download Cable X1
* Screws, Nuts, Pillars, and Wiring Accessories (Several)
Packing List:
* 1 x Set of V550 ROS2 Robot
Packaging Details (for Mecanum Wheel Version):
* G.W.: 4.5kg
Note:
* It will be assembled and debugged before shipping, so it will be ready to use as soon as you receive it.
* Depth camera is optional.


 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")

 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")
 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")
 PLUS Ackerman Robot Car High-End Version w/ Swing Suspension Basic Package without Lidar")
 PLUS Ackerman Robot Car High-End Version w/ Swing Suspension Raspberry Pi 5 8GB + N10P")

 PLUS Ackerman Robot Car (Top-End Version w/ Independent Suspension Raspberry Pi 5 + N10P)")
 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")
 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")