| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $3,078.68 | $3,015.85 | $2,921.60 | $2,795.94 | Contact US |
 XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 2 Leader Arms + 2 Follower Arms + Chassis + Cart + Jetson Orin Nano)
$2,296.50
XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 2 Leader Arms + 2 Follower Arms + Chassis + Cart + Jetson Orin Nano)
$2,296.50
 XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 1 Leader Arm + 1 Follower Arm + Chassis + Cart + Jetson Orin Nano)
$1,836.90
XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 1 Leader Arm + 1 Follower Arm + Chassis + Cart + Jetson Orin Nano)
$1,836.90
 XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 2 Follower Arms + Chassis + Cart + Jetson Orin Nano)
$1,855.36
XLeRobot SO-ARM101 Mobile Robot (Expansion Kit + 2 Follower Arms + Chassis + Cart + Jetson Orin Nano)
$1,855.36
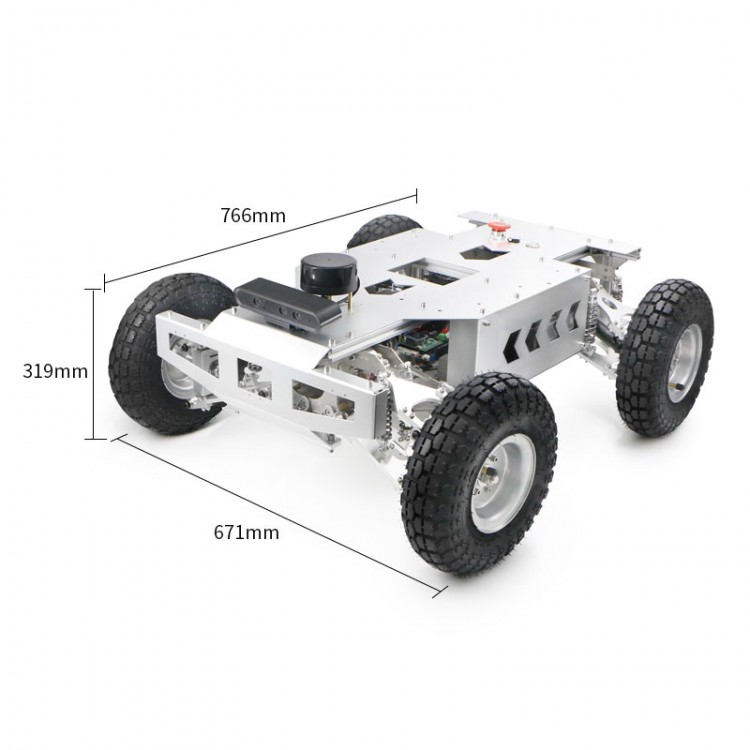
R550 (AKM) PLUS Ackerman Robot Car (Top-End Version w/ Independent Suspension Raspberry Pi 5 + N10P)
Top-End Version with Independent Suspension (ROS Package):
* 4-wheel independent suspension with shock absorption and front-wheel angle closed-loop control
* 254mm diameter inflatable rubber wheels
* Motor Power: 100W
* With a multi-mode controller
* It includes robot chassis, base controller (with driver), battery, charger, ROS main controller, depth camera and lidar. It is ready to run the ROS system out of the box.
Description:
R550 (AKM) PLUS is a flagship product designed for ROS-based robotics research and development.
Its chassis adopts an Ackermann steering structure, which is the current standard widely used in the new energy vehicle market.
This robot car integrates WHEELTEC's 10 years of chassis development experience and 6 years of ROS video tutorial resources, achieving both high cost-effectiveness and strong practicality.
It can be used in conjunction with LiDAR, depth cameras, and other sensors, making it especially suitable for low-cost robotics research and education.
Features:
WHEELTEC R550 (AKM) PLUS Ackerman Robot Car
* Includes 16GB+ of source-level video tutorials
* Optional LiDAR for mapping and navigation
* Swing suspension and independent suspension systems are optional
Advantages
* Fully Supports ROS2
* Provides ROS Melodic and ROS2 Humble images
* Base system runs FreeRTOS
* For Jetpack 6
* Compatible with TensorFlow and PyTorch
* ROS Qt Interface supported
* Optional Upgraded TOF LiDAR
* Supports Robot Formation (Swarm Control)
* With GMR Encoder
* All-Metal Chassis
* Comes with an Educational-Grade Development Manual
* Includes Source-Level Video Tutorials
* Technical Support Provided
Supports Multiple ROS1/ROS2 Systems
* When you purchase our robot car, we provide system images for four versions:
ROS1 Melodic, ROS1 Noetic, ROS2 Galactic, and ROS2 Humble.
* Raspberry Pi 5 (8GB) for ROS1 Melodic and ROS2 Humble
ROS2 System
* The goal of ROS2 is to become an operating system suitable for the majority of robots. Currently, almost all newly launched robotic projects by companies are directly based on ROS2.
* Compared to ROS1, ROS2 cancels the MASTER node management at the application layer, and enhances real-time communication at the middleware layer by adopting DDS (Data Distribution Service). At the system layer, ROS2 adds support for Windows, Mac, and microcontrollers.
* Supports for multi-robot systems
* Cross-platform system support
* Real-time control capability
* Supports microcontroller
Lithium Iron Phosphate Battery with Metal Shell
* Lithium iron phosphate (LiFePO4) batteries use lithium iron phosphate as the cathode material. The battery, with a metal shell and bracket protection, ensures that it won't catch fire or explode under extreme conditions like high temperature, overcharging, discharging, or external impact. Additionally, this battery is known for its high-temperature resistance, stability, and superior charging cycle performance, making it an excellent choice for balancing volumetric efficiency and safety.
* Upgraded Battery Protection Board: The built-in protection board provides comprehensive protection against short circuits, overcharging, and over-discharging, significantly enhancing the safety performance.
* High-Quality A-Class Battery Cells: The quality of the battery cells directly determines the quality of the battery. By using high-quality, original battery cells from leading new energy manufacturers, this battery ensures higher energy density and greater safety.
* Metal Protection Shell: The metal shell assists with heat dissipation, improves the integrity of the appearance, and provides impact resistance.
Battery Specifications
* Battery Pack: 22.4V 6000mAh
* Cutoff Voltage: 16.5V
* Fully Charged Voltage: 25.55V
* Maximum Instantaneous Discharge Current: 40A
* Cell Material: Lithium Iron Phosphate (LiFePO4)
* Charging Current: 3A
* Discharge Performance: Continuous discharge at 15A
* Connectors: DC4.0x1.7mm Female (Charging); XT60U-F Female (Discharge)
Multi-Mode Controller
* The controller supports both wired and wireless connections, with a wireless communication range of up to 25 meters. It features 15 buttons and 6 analog channels, with customizable functions for DIY use. When remotely controlling the robot, it provides vibration feedback for a more immersive experience. Compared to traditional RC controllers, it is better suited for robotic applications.
* Compact in size and ergonomically designed, it offers a comfortable grip.
* The receiver connects via a stable USB interface.
Patented Ackermann Chassis Technology
* All chassis are made of fully machined metal. Equipped with a high-precision suspension system typically found only on premium models, the chassis is capable of handling uneven terrain with ease.
* It uses a clamp-type coupling to secure the wheels, so you'll never have to worry about them falling off again.
DeepSeek Large Model Local Deployment
* The Orin series and Raspberry Pi 5 controllers, with their powerful computing capabilities and energy efficiency, perfectly support the local deployment of the DeepSeek-R1 large model. This enables efficient, low-latency AI inference. Local deployment of the DeepSeek model significantly reduces reliance on the cloud, greatly improving response speed and system stability, and empowers intelligent devices with stronger autonomous decision-making capabilities.
* We provide system images and a complete local deployment tutorial.
GMR High-Precision Encoder
* Upgraded with a 500-line A/B phase GMR high-precision encoder, this new version offers more than 38 times the accuracy of typical Hall encoders (commonly used in similar products on the market). With the GMR encoder, the robot car delivers exceptional performance during low-speed navigation, ensuring more precise movement and control.
Supports Bluetooth Wireless Code Programming
* The Bluetooth module provided with the robot chassis not only allows for remote debugging of the robot but also supports the use of the dedicated Bluetooth programming host developed by WHEELTEC for code flashing. The entire flashing process takes only a few seconds, greatly facilitating secondary development.
Magnetic Quick-Release Mounting Base
* The battery attaches to the chassis using a magnetic connection, allowing for instant battery swaps with zero downtime. During normal use, the combination of magnetic force and a positioning block at the base ensures the battery remains securely in place.
Key Features Introduction (Fully Open Source):
* RTAB-Map 3D Mapping & Navigation with Vision and LiDAR: It supports RTAB pure visual SLAM navigation. It supports LiDAR and visual fusion 3D mapping and navigation.
* Classic 2D LiDAR Mapping, Navigation, and Obstacle Avoidance: ROS2 supports mapping with Gmapping, Cartographer, and slam_toolbox. ROS1 supports Gmapping, Hector, Karto, and Cartographer for mapping. It enables fixed-point navigation, multi-point navigation, and obstacle avoidance during navigation.
* ORB Visual SLAM: ORB-SLAM2 is an open-source visual SLAM framework that can compute camera pose in real time and reconstruct a sparse 3D map of the environment. In RGB-D mode, it provides true scale information.
* Graphical ROS QT Interface: Deploy a QT-based GUI to launch ROS functions with one click. It provides intuitive feedback on robot speed, battery level, and more.
* YOLO Object and Gesture Recognition: Uses common deep learning model libraries to recognize everyday objects and gestures.
* ros_tensorflow Object Detection: Enables recognition of common objects and handwritten digits using TensorFlow.
* Depth Vision Following: Uses a depth camera to detect object distance and direction for intelligent robot following.
* KCF Object Tracking: It tracks fixed-feature targets using a depth camera, allowing the robot to follow the object.
* AR Tag Recognition and Following: It detects and tracks AR tag poses with a depth camera, enabling the robot to follow and localize based on AR tags.
* RRT Autonomous Exploration and Mapping: The robot can autonomously explore, build a map, save it, and return to the starting point without manual control using the RRT algorithm.
* Webcam Monitoring: View the robot's camera feed directly from any browser on a PC for quick remote monitoring deployment.
* LiDAR-Based Following: Robot follows the nearest detected object using LiDAR scan data.
* LiDAR Angle Masking: SDK-level optimization supports angular masking for all LiDAR models.
* TEB & DWA Path Planning: Extensive video tutorials and Python-based mini-games help you learn path planning from scratch.
* DWB / MPPI / RPP Path Planning: Three ready-to-use controller plugins (DWB, MPPI, RPP) support path tracking for various robot shapes and scenarios.
* Full-Coverage Path Planning: It automatically generates way-points to cover a selected area for full-area path navigation.
* Robot Chassis Kinematics Analysis: It covers kinematic analysis for Ackerman, differential, tracked, Mecanum, omnidirectional, and 4WD robot chassis.
* Path Recording and Replay: Records the robot's movement path and replays it using the Nav2 navigation framework.
* URDF Models for All Robot Versions: Detailed URDF models accurately reflect the real robot's structure.
* ROS Mobile App for Mapping & Navigation: Control the robot, perform mapping, and navigate using the dedicated ROS mobile app.
* Powerful Low-Level Tuning Control App: For Android and iOS. Parameter tuning, gravity-sensing control, and waveform display are supported by the mobile app.
Provides Source-Level Video and Documentation Tutorials:
Including but not limited to the following materials:
* Basic ROS Video Series
* Detailed Video on ROS SLAM Principles and Algorithms
* ROS Functional Development Code-Level Video Tutorials
* Basic ROS2 Learning Video Tutorials
* ROS2 Functional Development Code-Level Video Tutorials
* ROS2 Microphone Array Tutorial Video
* Deep Learning Tutorial for Autonomous Driving Sandbox Scenarios
* Moveit Robotic Arm Video Tutorial
* Kinematic Model for Wheeled Mobile Robots Video Tutorial
* STM32 Low-Level Source Code and ROS Communication Video Tutorial
* Autonomous Driving 3D Reconstruction Development Video Tutorial
* Basic Ubuntu Tutorials for ROS
Raspberry Pi 5 (8GB):
* ROS Main Controller: Raspberry Pi 5 (8GB)
* CPU: Cortex-A76 (For ARM) 64-bit Quad-Core at 2.4GHz
* GPU: VideoCore VII GPU at 800MHz
* Computing Power: 0.8 TOPS (FP16)
* Memory: 8GB
* USB Ports: 2 × USB 3.0, 2 × USB 2.0
* Image Input: MIPI CSI
* Image Output: 2 × Micro-HDMI-compatible (up to 4Kp60 resolution)
* Video Encoding: Not supported
* Video Decoding: H.265 (4Kp60)
* Onboard Storage: 64GB MicroSD card
* Network Interface: Gigabit Ethernet or Wi-Fi 802.11ac
* GPIO Pins: 40
* Rated Power: 25W (5V/5A)
* Power Input: 5V
N10P Lidar:
* Lidar: LSLIDAR N10P
* Measuring Range: 25 meters
* Scanning Frequency: 6–12 Hz (adjustable)
* Sampling Frequency: 5400 Hz
* Output Data: Angle, Distance and Light Intensity
* Angular Resolution: 0.4°–0.8° (adjustable)
* Ambient Light Resistance: 60KLux (supports outdoor use)
* Interface Type: Serial Port
* Motor Type: Brushless Motor
* 360° Scanning and Ranging: Yes
* Operating Principle: Time of Flight (ToF)
Hardware List:
* LSLIDAR N10P Lidar
* ROS Main Controller: Raspberry Pi 5 (8GB)
* Orbbec Astra Series Depth Camera
* C50C STM32 Main Control Board for the Robot
* D50A Motor Driver Module
* Bluetooth Module
* OLED Display
Orbbec Astra Series Depth Camera:
* The depth camera with a self-developed hinge that supports adjustable angles
* Depth Resolution: Up to 640×480
* RGB Resolution: Up to 640×480
* RGB Sensor FOV (H × V): 63.1° × 49.4°
* Depth Sensor FOV (H × V): 58.4° × 45.5°
* Structured Light Type: Monocular Structured Light + Monocular RGB
* Depth Frame Rate: Up to 30 fps at 640×480
* RGB Frame Rate: Up to 30 fps at 640×480
* Depth Range: 0.6 m to 4 m
* Dimensions (L × W × H): 165 × 40 × 30 mm
* Data Interface: USB 2.0 or higher
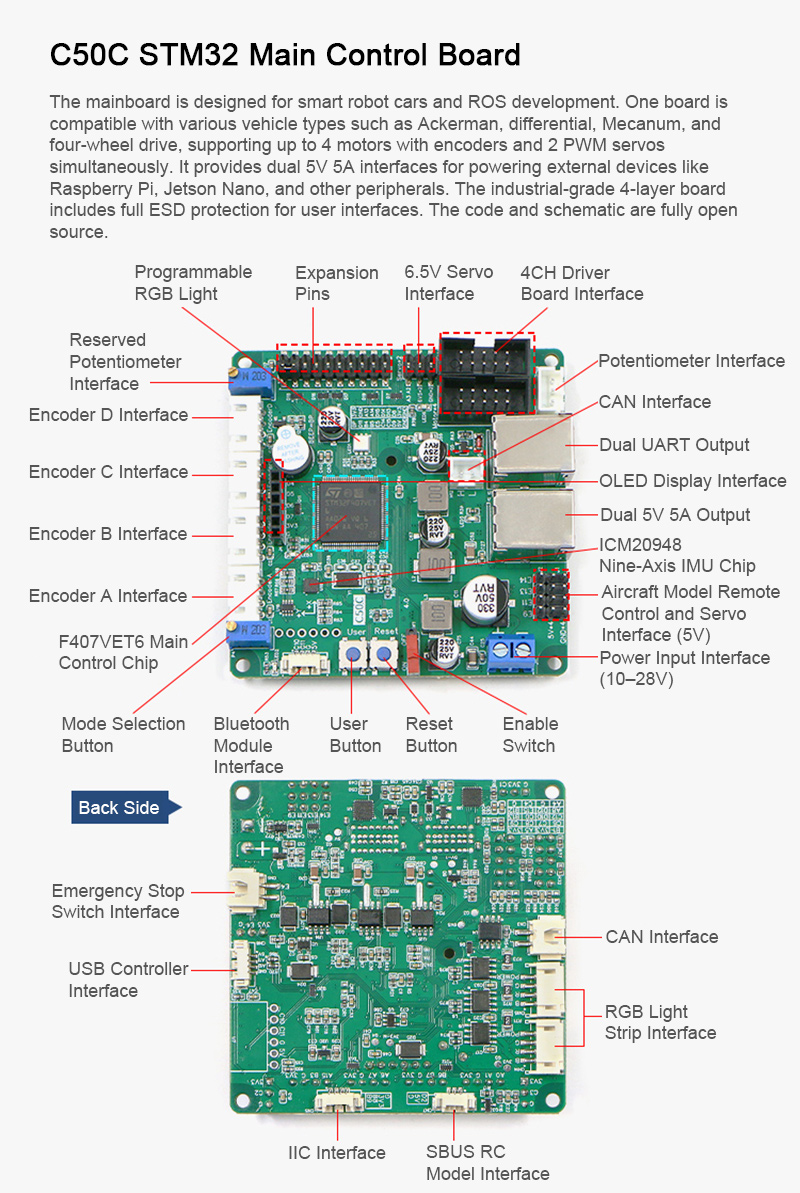
C50C STM32 Main Control Board:
* The mainboard is designed for smart robot cars and ROS development. One board is compatible with various vehicle types such as Ackerman, differential, Mecanum, and four-wheel drive, supporting up to 4 motors with encoders and 2 PWM servos simultaneously. It provides dual 5V 5A interfaces for powering external devices like Raspberry Pi, Jetson Nano, and other peripherals. The industrial-grade 4-layer board includes full ESD protection for user interfaces. The code and schematic are fully open source.
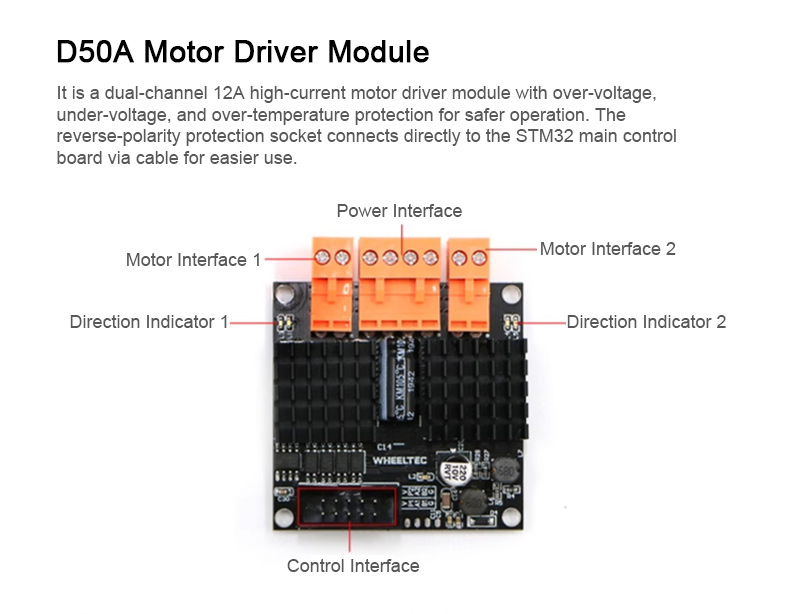
D50A Motor Driver Module:
* It is a dual-channel 12A high-current motor driver module with over-voltage, under-voltage, and over-temperature protection for safer operation. The reverse-polarity protection socket connects directly to the STM32 main control board via cable for easier use.
* 4-Layer PCB for Enhanced Current Handling: While most similar products on the market use low-cost 2-layer PCBs, this driver module features a higher-cost 4-layer PCB. This significantly improves current handling capability and allows for a much higher and more stable continuous output current.
Configuration:
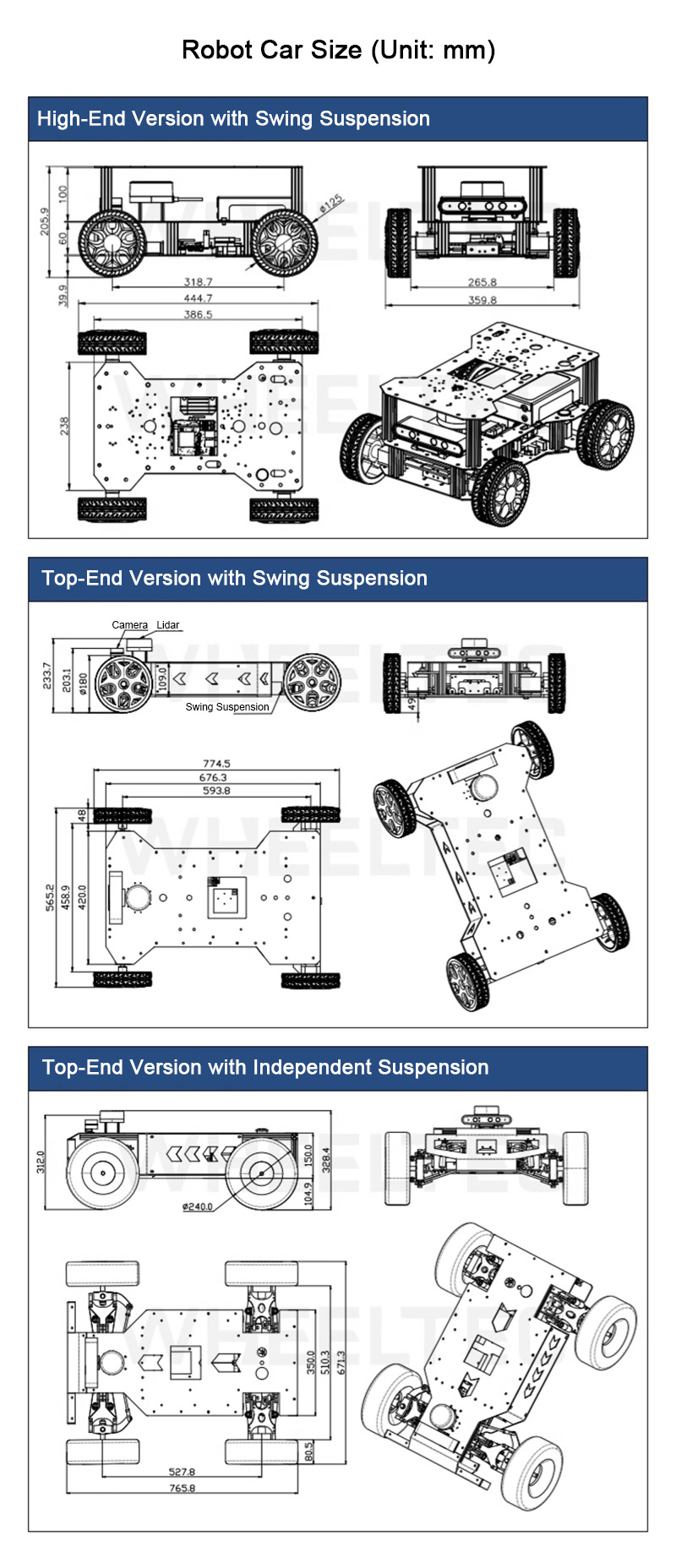
1. Top-End Version Chassis with Independent Suspension:
* 4 x 254mm Inflatable Rubber Wheels
* 1 x DS5160 Digital Servo
* 2 x MD60 100W Motors
* 2 x Bevel Gear Motor Mounts
* 1 x Full Metal Chassis Frame
* 1 x Set of Screws, Nuts, Standoffs, and Wires
* 2 x Reinforced Metal Ball Head Tie Rods
* 1 x Car-like Front and Rear Axle Steering System
* 1 x Front Wheel Steering Angle Sensor
* 4 x Independent Suspension Systems (with 8 Shock Absorbers)
* 1 x Reinforced Linear Guide Rail
2. Electronic Control:
* 1 x STM32 Main Control Board
* 1 x Motor Driver Module
* 1 x Bluetooth Module
* 1 x OLED Display
* 1 x Multi-mode Controller
* 1 x 24V 6000mAh LiFePO4 Battery
* 1 x 25.55V Fast Charger
* 1 x Data Download Cable
* 1 x Flat Cable
3. ROS Parts:
* 1 x ROS Main Controller
* 1 x LiDAR
* 1 x Camera and its Angle Adjustment Mechanism
* 1 x 64GB Memory Card and Card Reader (for the version with Raspberry Pi 5)
Packing List:
* 1 x Set of Assembled Robot Car
Packaging Details:
* G.W.: 38kg
Note:
* The robot does not support automatic recharging.
* The circuit board, battery, and charger are the same across different robot configurations — only the chassis varies.
* The robot car has been assembled and debugged. It is ready to use.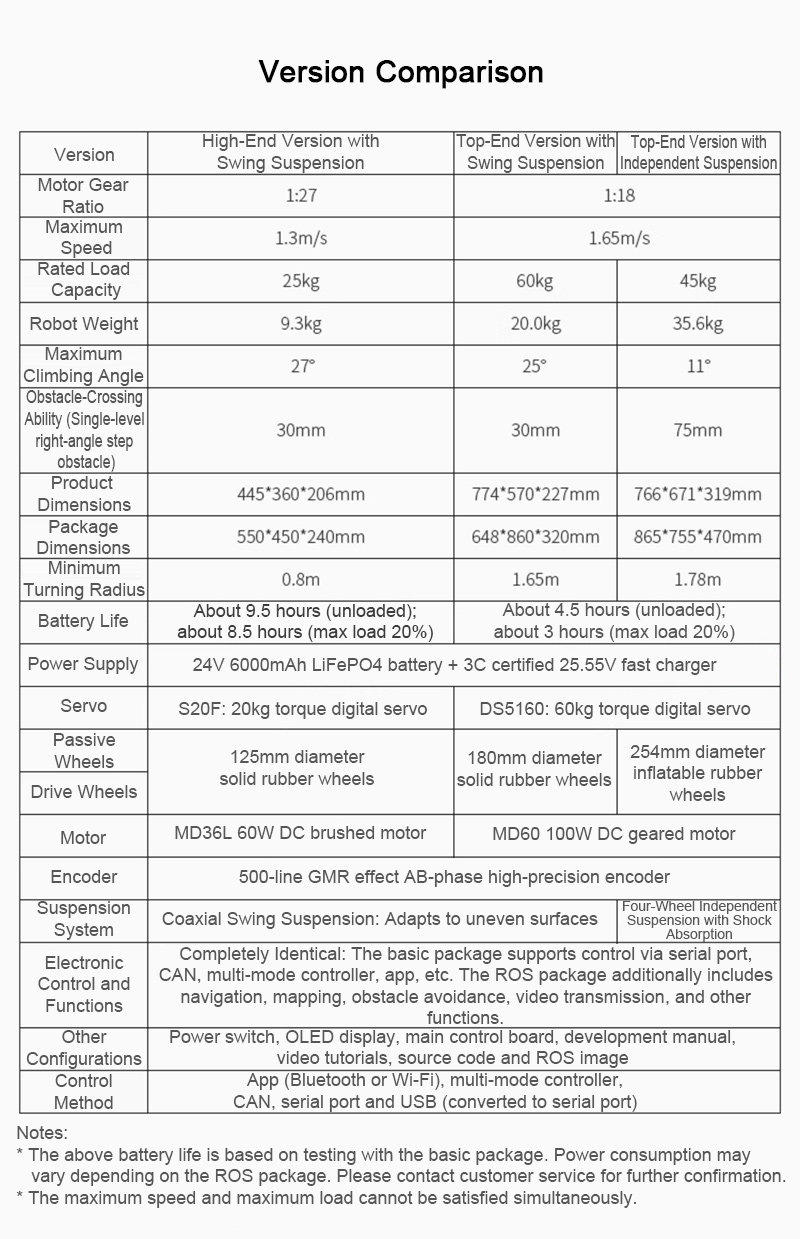

 PLUS Ackerman Robot Car (Top-End Version w/ Independent Suspension Raspberry Pi 5 + N10P)")

 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")
 PLUS Ackerman Robot Car High-End Version w/ Swing Suspension Raspberry Pi 5 8GB + N10P")


 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")
 PLUS Ackerman Robot Car High-End Version w/ Swing Suspension Basic Package without Lidar")
 PLUS Ackerman Robot Car Top-End Version w/ Independent Suspension Orin NX 8GB + C16 Lidar")
