| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $12,385.43 | $12,132.66 | $11,753.52 | $11,247.99 | Contact US |
 G1009 10-inch Embedded HD Industrial Monitor 1024x768 Hook Mount TFT Display with BNC/VGA/AV/HDMI-compatible Ports
$109.57
G1009 10-inch Embedded HD Industrial Monitor 1024x768 Hook Mount TFT Display with BNC/VGA/AV/HDMI-compatible Ports
$109.57
 G121SN01 V3 Color Active Matrix LCD Display Panel Designed for Various Industrial Applications
$88.42
G121SN01 V3 Color Active Matrix LCD Display Panel Designed for Various Industrial Applications
$88.42
 RTU-307D NET-07D 8AI-8DI-8DO Data Acquisition Module IO Module (RS485+RS232) for Industrial Use
$76.89
RTU-307D NET-07D 8AI-8DI-8DO Data Acquisition Module IO Module (RS485+RS232) for Industrial Use
$76.89
WHEELTEC S300 Intelligent Mobile Robot (Robot Chassis and Collaborative Robot Arm Including Gripper)
Advantages:
- High-precision encoder
- Hub brushless motor
- Independent suspension system
- All-metal housing
- Optional Lebai robotic arm
- Ultrasonic stereoscopic collision avoidance system
- Dual TOF radar
- Dual depth camera
- Hidden light strip
- Support map navigation
- ROS operating system
- Support operating system for FreeRTOS
- Source code schematics are open source
Description:
S300
uses a number of core chassis patents. It is equipped with an
independent suspension system and LM3 robotic arm (optional). The robot
is able to return to the charging pile on its own to recharge. It is
equipped with two Leishen TOF lidar and a complete stereo ultrasonic
collision avoidance system, equipped with the Gemini Pro binocular depth
camera to maximize hardware performance. At the same time, we also
provide customers with open source software and high-value scientific
research platforms.
Jetson TX1 Industrial Control Computer (Built-in SSD):
The Jetson TX1 has more than twice the computing power of the Jetson nano and can also share the software ecosystem for NVIDIA.
Compared
with ROS main control for Xavier Nx, in actual use, the Jetson TX1 has a
slightly slower training speed at the edge end, and there is almost no
significant difference in other performance. The Jetson TX1 is
cost-effective.
Jetson TX1:
- CPU: For ARM Cortex-A57MPCore 64-bit at 1.73GHz (quad-core)
- GPU: 256-core GPU for NVIDIA Maxwell
- Memory: 4GB 64-bit LPDDR4 Memory
- USB ports: 1*USB 3.0 and 1*Micro USB
- Image Input: MIPI CSI
- Image output: 1*HDMI 2.0
- Video encoding: H.264/H265 (4Kp30)
- Video Decoding: H.264/H265 (4Kp60)
- Onboard storage: 16GB eMMC 5.1 + 64G SSD
- Network interface: 10/100/1000 BASE-T Ethernet
- Number of GPIO pins: 40
- Rated power: 15W
- Power input: DC12~24V+10%
- Size: 128 x 98 x 70mm/5 x 3.9 x 2.8"
- Net weight: 0.93kg/2.1lb
Dual TOF Lidars:
The
M10P is a high-end commercial lidar. The S300 is equipped with two M10P
lidars, which enable 360° radar detection without dead zones. Its
ultra-high sampling rate and accuracy ensure higher obstacle avoidance
performance during autonomous navigation.
M10P Serial Port Version:
- Measurement radius: 30m/98.4ft
- Scanning frequency: 12Hz
- Sampling frequency: 20000Hz
- Output: angle and distance
- Angular resolution: 0.22°
- Driven motor type: brushless motor
- 360° scanning ranging: √
- Interface type: serial port
- Radar principle: TOF
Gemini Pro Depth Camera:
The
Gemini Pro is a binocular depth camera. It can meet the needs of
outdoor use. Its performance is comparable to imported cameras such as
the D435. It is smaller and more delicate, with smaller blind zones. The
S300 with robotic arm version is equipped with two Gemini Pro cameras.
- Ranging principle: binocular structured light (infrared projection)
- Depth range: 0.5-2.5m/1.6-8.2ft
- Depth resolution: USB3.0: 640x480 at 640fps
- Depth Field of View (FOV): H67.9° x V45.3°
- RGB resolution: USB3.0: 640x480 at 640fps
- RGB field of view (FOV): H71.0° x V56.7°
- Data and power interface: USB3.0 Type C
- Working environment: indoor/outdoor
- Power consumption: < 2.2W
- Safety: Class1 laser
Product Information:
- Item name: Open Source Mobile Robot
- Model: S300
- Chassis drive structure: differential structure
- Wheels: Double active wheels and four driven wheels
- Maximum chassis speed: 2.0m/s
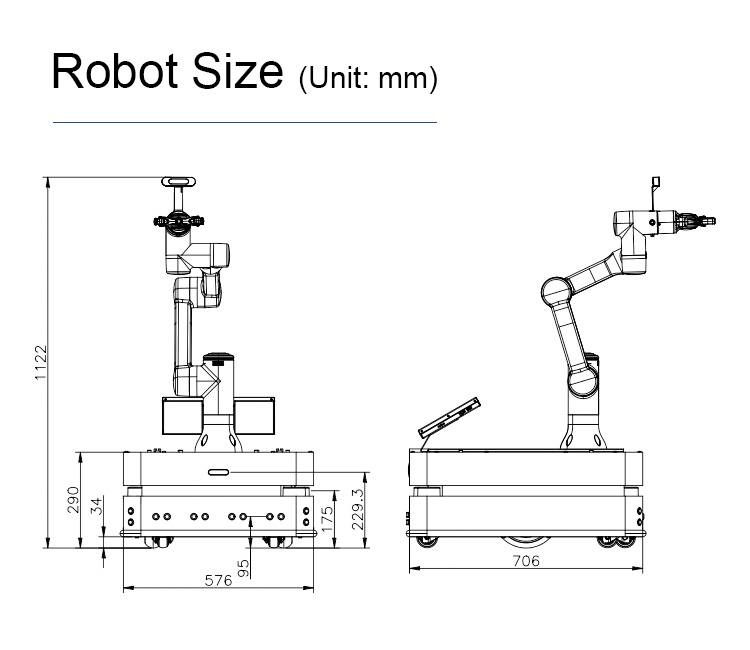
- Chassis dimensions (without the size of robotic arm): 705 x 576 x 290mm/27.8 x 22.7 x 11.4" (LxWxH)
- Maximum load capacity of chassis: 60kg/132.3lb
- Degrees of freedom of robotic arm: 6DOF
- Robot arm working radius: 638mm/25.1"
- Robot arm repeatability: ±0.5mm/±0.02"
- Robot arm end speed: < 2m/s
- Robotic arm gripper load capacity: 1kg/2.2lb
- End-of-arm camera: Gemini Pro camera
- Net weight: without robotic arm: 56kg/123.5lb; With robotic arm: 70kg/154.3lb
- Robot ROS master: Jetson TX1 (default); for Xavier NX (optional)
- Robot control mode: APP, CAN, serial port, etc.
-
Open source description: Open source chassis source code, schematics,
and 3D models. The robotic arm is not open source, only SDKs and 3D
models are provided
- Robot sensors: 2 TOF radars, 2 depth cameras, and 6 ultrasonic sensors
- Battery: 22.2V 20000mAh lithium battery
Attention:
-
The version with chassis comes with one depth camera, and the version
with robot arm comes with one more depth camera on its robot arm end
effector.
Highlights:
- Automatic recharge: Combined
with the mapping and navigation function of ROS, the location of the
charging pile is marked on the map, and the robot can navigate to the
vicinity of the charging pile by itself for docking charging. Charging
pile position calibration, robot and charging pile docking method, low
battery automatic recharging and other functions have corresponding
tutorials
- With a 6DOF Lebai collaborative robot arm: Optional Lebai
LM3 six-axis collaborative robotic arm, with lightweight body, simple
appearance, and maximum load of 1kg/2.2lb, can be equipped with
different types of end effectors to complete the corresponding assembly,
handling and other operations
- Robotic arm: Joints are unlimited.
All joints of the robotic arm can be rotated without limited range of
motion, which provides more possibilities for robot application
scenarios (*The unlimited range of motion of the joints needs to exclude
the situation that the robot self-interference and no external objects
are blocked, and the self-interference situation varies, depending on
the actual application scenario. )
- Supports collision safety
protection. When an object collision is detected, the robot immediately
stops/pauses, providing timely and effective safety assurance for the
surrounding people/things
- Dual quality TOF lidars: Two M10P lidars
are installed diagonally of the car body. Through data fusion, it
enables a 360° perception of the environment and eliminates blind spots
-
Stereo ultrasonic blind spot elimination system: Through the six stereo
ultrasonic sensors on the front of the chassis, the robot can complete
the blinding of the space that cannot be scanned by the radar and avoid
the risk of collision
- Innovative independent suspension chassis:
With an innovative suspension structure, the chassis can solve core
problems such as wheel suspension. Together with the hub motor and
silent universal wheels, the overall robot runs smoothly and noiselessly
-
Fully open source and support secondary development: The chassis is
fully open source, including 3D models, source code, schematics,
development manuals, etc., to help you efficiently carry out secondary
development
Key Functions (Open source):
Rtabmap vision and lidar 3D mapping and navigation
Support rtab pure visual mapping navigation, and support radar and visual fusion mapping navigation
Classic 2D lidar mapping, navigation, obstacle avoidance
Support
for Gmapping, hector, karto, cartographer. Support fixed-point
navigation, multi-point navigation, and obstacle avoidance during
navigation
Collision protection
When an object collision is
detected, the robot immediately stops/pauses, providing timely and
effective safety guarantees for the surrounding people/things
Support force-controlled gripping of objects
Equipped with a large-stroke force-controlled electric gripper, it can grasp objects of different sizes and shapes
ROS QT function of graphical interface
Deploy QT graphical interface to realize one-click ROS function, intuitive feedback of car speed, power and other information
Yolo traffic sign recognition
You can train your own library of deep learning models. Simple autonomous driving is realized through the RGB camera
Yolo object and gesture recognition
Identify everyday objects using common libraries of deep learning models
Ros_tensorflow object detection
Based on tensorFlow, it can realize the recognition of common objects and the recognition of handwritten digits
Deep vision following
The robot follows by recognizing the distance and orientation of the object by the depth camera
KCF target tracking
The following function of the robot is realized by identifying objects with fixed features by the depth camera
AR tag recognition and following
The
depth camera recognizes and tracks the attitude of the AR tag, enables
the robot to follow through the AR tag, and expands the positioning of
the AR tag
RRT independently explores mapping
Use the RRT
algorithm to perform the following operations independently: explore
mapping, save maps, and return to the starting point of mapping
Web camera surveillance
The robot camera image can be viewed through any browser on the PC side, and remote monitoring can be quickly deployed
RGB camera line following
By following the ground line with the RGB camera and the lidar, automatic obstacle avoidance can be realized during line patrol
Lidar for following
The robot scans nearby obstacles through lidar and selects the nearest object to follow
LiDAR angle shielding
Through SDK optimization, angle shielding can be achieved for all lidars
TEB and DWA path planning
Provide extremely detailed video tutorials to take novices to learn navigation path planning in depth through python mini games
Robot chassis kinematics analysis
Provide
kinematic analysis of robot chassis on the market, including Ackerman,
differential, track, mecanum wheel, omnidirectional wheel, and 4WD
vehicles
The protection circuit of control board
The
electrical wiring of the industrial-grade four-layer board is more
compliant, the thermistor realizes real-time temperature control
monitoring and protection, and the current sampling realizes the
over-current protection of stalled motor through hardware detection
Provide ROS APP for mapping and navigation
Support ROS end control through APP, and realize the control, mapping, navigation and other functions of the car
The bottom end provides a powerful parameter control APP
APP for Android and IOS; Support APP parameter adjustment, gravity sensor control, and waveform display
Source-level video tutorials are available:
-
Deep learning video tutorial based on autonomous driving sandbox
scenario (Chinese and English subtitles): Through the setting of
autonomous driving scenarios, the ROS function is projectized and
scenario-based, so that the ROS knowledge you learn can be better
applied to actual projects
- Moveit Robotic Arm Video Tutorial
(English and Chinese subtitles): Reduced code routines, RVIZ visual
interface, take you into the world of Moveit robotic arm learning
- ROS SLAM Principles and Algorithms Detailed Video Tutorial (Chinese and English subtitles)
- ROS Basic Video Tutorial (Chinese and English Subtitles)
-
STM32 low-level source code and ROS communication video tutorial
(Chinese and English subtitles): From the underlying STM32 code parsing
to the ROS basic communication framework construction code-level
analysis
- ROS-related ubuntu basic tutorial (Chinese and English
subtitles): Quickly master ROS-related ubuntu basics, and improve the
backup and burning process for Raspberry Pi/Jetson nano
- ROS
function development code-level video tutorial (some videos have Chinese
and English subtitles): Code analysis of core functions such as ROS
mapping and navigation
- ROS Voice and Video Tutorials (Chinese and
English subtitles): Provides basic application tutorials and code
analysis combining ROS voice and iFlyTek
Software and Hardware Introduction:
A touchscreen and wireless keyboard:
-
Equipped with a 14" touchscreen and wireless keyboard. The keyboard's
built-in touchpad replaces a mouse and allows you to debug your robot
anytime, anywhere
Body power indicator:
- The hidden light strip embellishes the all-metal shell to greatly enhance the robot's aesthetics
With RC remote control:
-
Built-in model aircraft remote control interface. After plugging in the
model aircraft remote control, you can control the remote control
normally
Battery:
- The capacity of the battery is upgraded
to 20000mAh. The battery has the safety performance of air
transportation, and has multiple protections such as over-discharge,
overcharge, short circuit, and over-voltage. It also comes with a
protective charger
- Capacity: 22.2V 20000mAh
- Plug: T-type discharge plug
- Discharge performance: 60A continuous discharge
- Dimensions: 155 x 124 x 71mm/6.1 x 4.9 x 2.8"
- Weight: 2.2kg/4.9lb
Main Hardware:
- Laser radar M10P serial port version
- ROS master Jetson TX1 (the one for Xavier Nx is optional)
- RC remote control
- Gemini Pro depth cameras
- WheelBoard C50A
- 14" touch screen
Package Included:
- 1 x Set of S300 robot chassis and control system
- 1 x LM3 robot arm and control system
- 1 x LMG-90 force control gripper
- 2 x M10P radars
- 2 x Gemini Pro depth cameras
- 6 x Ultrasonic sensors
- 1 x RC remote control
- 1 x Charging pile
- 1 x 20000mAh lithium battery
- 1 x Robot charger
- 1 x Data download cable
Note:
- The robot is able to return to the charging pile on its own to recharge.
- Depth camera is included in the package.
- It is assembled and has been debugged. Therefore, it is ready to use.
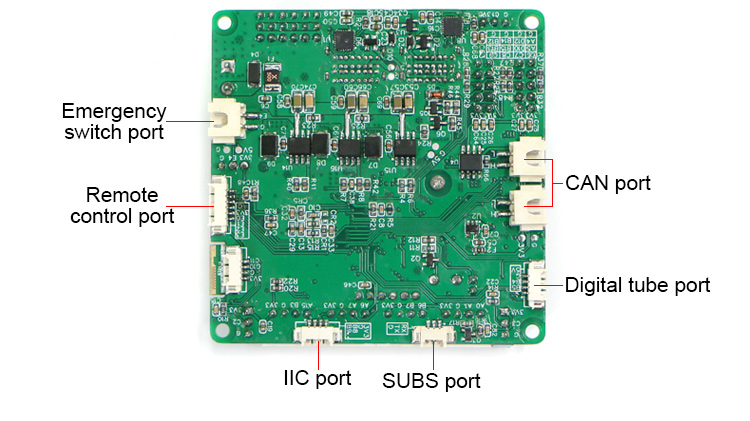
C50A Bottom Control Board:
C50A
is the bottom control board of the robot. Its overall performance is
outstanding. It adopts industrial-grade 4-layer board and provides
multiple protection such as over-temperature and over-current, and
reserves common robot development interfaces. It is compatible with
brushed and brushless motors, reserves ROS interface and is equipped
with corresponding SDKs and open source schematics.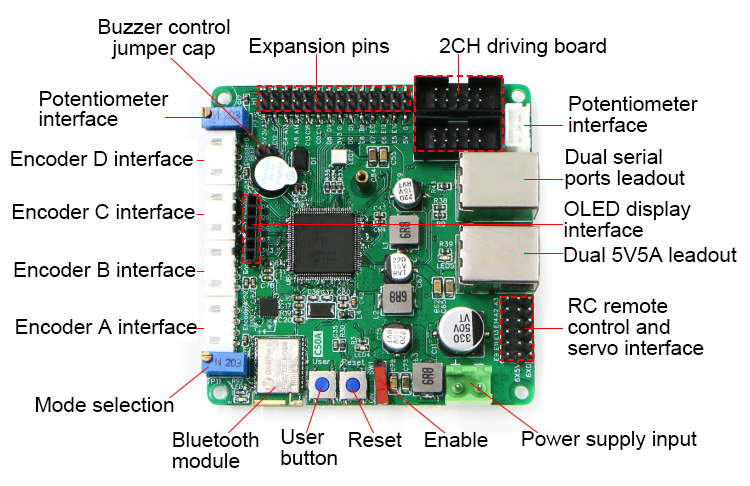

")
")
")
")


")
, Mecanum Wheel Chassis & 5DOF Robot Arm")
")

 & SD Card")
 PLUS Ackerman Robot Car (Top-End Version w/ Independent Suspension Raspberry Pi 5 + N10P)")
")