| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $38.21 | $37.43 | $36.26 | $34.70 | Contact US |
 M5Stack Paper S3 E-Paper Display Touchable Low Power Consumption 4.7-inch E-ink Display Development Kit ESP32S3
$87.42
M5Stack Paper S3 E-Paper Display Touchable Low Power Consumption 4.7-inch E-ink Display Development Kit ESP32S3
$87.42
 LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
 Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
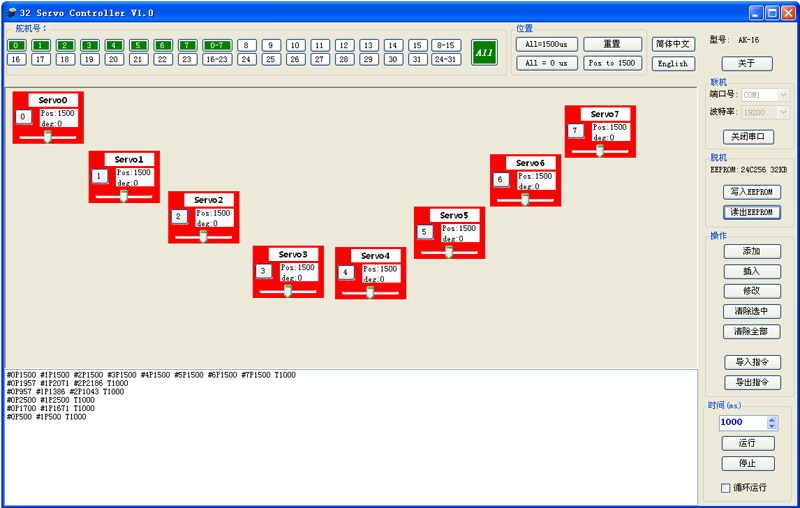
AK-32 32 Channel Servo Control Board Arduino USB for Smart Car
Specifications:
- Working current:31mA
- Analog output:32 channel
- Current capacity: control 16 servoes each side,max current 15A.Total current:30A
- Serial input :USB/TTL232(Baud rate:19200)
- Servo control resolution:0.09°/1us
- PC Baord size:40mmx 50mm
Arduino eg:
void setup() {
Serial.begin(19200);
}
void loop() {
move(1, 2000, 100);
move(1, 1000, 100);
}
void move(int servo, int position, int time) {
Serial.print("#");
Serial.print(servo);
Serial.print(" P");
Serial.print(position);
Serial.print(" T");
Serial.println(time);
delay(time);
}




")


")


