| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $442.27 | $433.25 | $419.71 | $401.66 | Contact US |
 DM-J8009P-2EC DM8009P 24V 20Nm Joint Motor Geared Motor with Cross Roller Bearing and Two Encoders
$451.30
DM-J8009P-2EC DM8009P 24V 20Nm Joint Motor Geared Motor with Cross Roller Bearing and Two Encoders
$451.30
 DM-J4340-2EC (24V) 9NM Joint Motor Servo Motor DM4340 Gear Motor (Including Drive) w/ Two Encoders
$169.44
DM-J4340-2EC (24V) 9NM Joint Motor Servo Motor DM4340 Gear Motor (Including Drive) w/ Two Encoders
$169.44
 DM-J4340-2EC (24V) 9NM Joint Motor + USB to CAN Module + Power Adapter Board + Two-ended Cable
$185.18
DM-J4340-2EC (24V) 9NM Joint Motor + USB to CAN Module + Power Adapter Board + Two-ended Cable
$185.18
DM-J8009P-2EC DM8009P 24V 20Nm Joint Motor Geared Motor with Cross Roller Bearing and Two Encoders
Advantages:
* Rated Torque: 20Nm
* Cross Roller Bearing
* Single-Turn Absolute Position Output Shaft
* Built-In Driver
* Three Operation Modes
* Built-In Gearbox
* Dual Built-In Encoders
Features:
* Dual-encoder system, with single-turn absolute position output shaft, ensures no loss of absolute position during power outages
* Integrated motor and drive design, and compact structure with high level of integration
* Supports PC-based visual debugging and firmware upgrades
* Capable of real-time feedback via CAN bus, including motor speed, position, torque, and temperature data
* Equipped with dual-temperature protection for enhanced safety
* Supports trapezoidal acceleration/deceleration in position control mode
Specifications:
Motor Parameters:
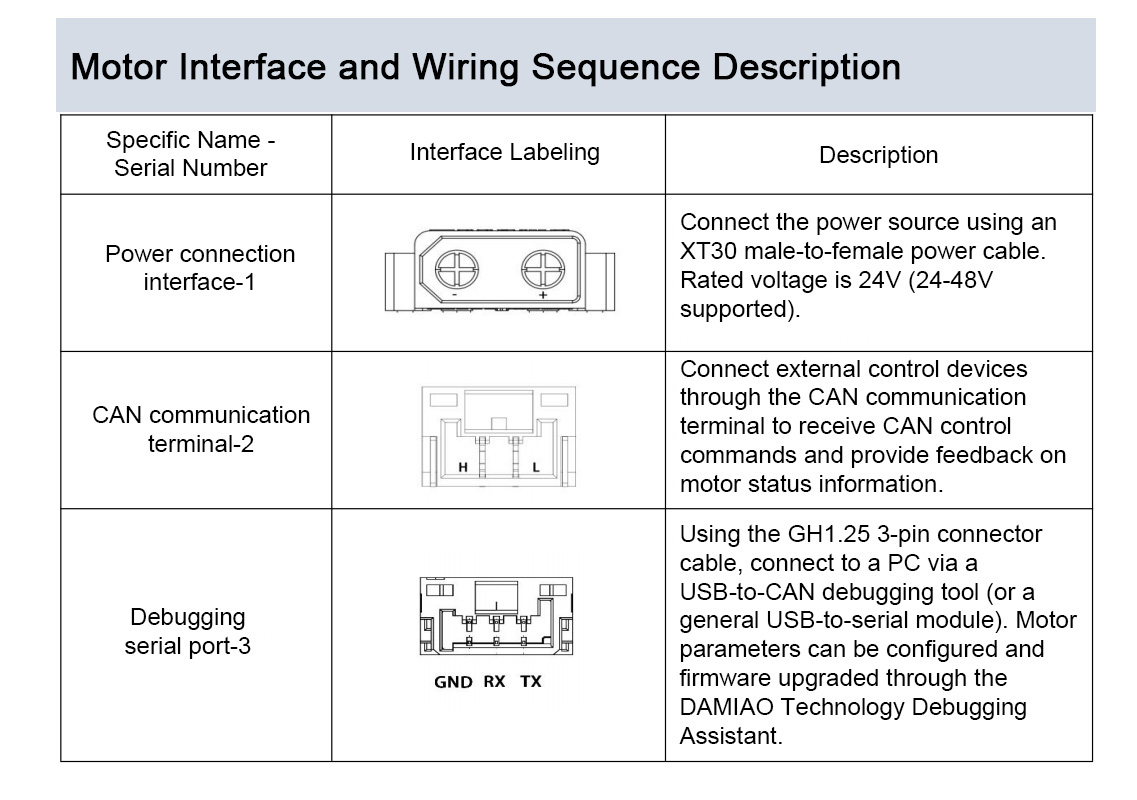
* Rated Voltage: 24V (supports 24-48V)
* Rated Current: 20A
* Peak Current: 50A
* Rated Torque: 20Nm
* Peak Torque: 40Nm
* Rated Speed: 100rpm
* No-Load Max Speed: 24V: 160rpm; 48V: 320rpm
Motor Characteristics:
* Gear Ratio: 9:1
* Pole Pairs: 21
* Phase Inductance: 80μH
* Phase Resistance: 0.145Ω
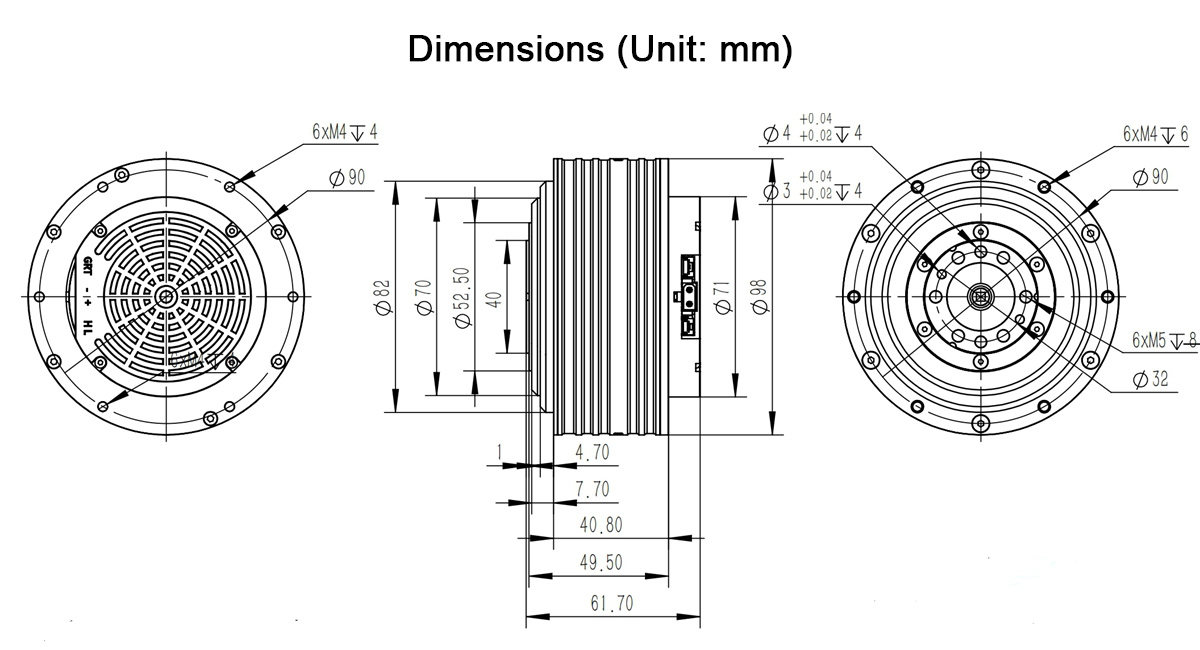
Structure & Weight:
* Outer Diameter: 98mm
* Height: 61.7mm
* Weight: About 930g
Encoder:
* Encoder Resolution: 14-bit
* Number of Encoders: 2
* Encoder Type: Magnetic (single-turn, absolute position output per shaft rotation)
Communication:
* Control Interface: CAN at 1Mbps
* Parameter Adjustment Interface: UART at 921600bps
Control Modes:
* MIT mode, speed mode and position mode
Protection:
* Driver Over-temperature Protection: Protection temperature set at 120°C. When overheating occurs, the motor will exit "Enable Mode".
* Motor Over-temperature Protection: Set according to use requirements, recommended not to exceed 100°C. When overheating occurs, the motor will exit "Enable Mode".
* Motor Over-voltage Protection: Set according to use requirements, recommended not to exceed 52V. When over-voltage occurs, the motor will exit "Enable Mode".
* Communication Loss Protection: If no CAN command is received within the set period, the motor will automatically exit "Enable Mode".
* Motor Over-current Protection: Set according to use requirements, recommended not to exceed 39A. When over-current occurs, the motor will exit "Enable Mode".
* Motor Under-voltage Protection: If the power supply voltage is below the set value, the motor will exit "Enable Mode". Power supply voltage should not be less than 15V.
Packing List:
* Motor (with driver) ×1
* Power cable: XT30 male-to-female power cable (length: 200mm) ×1
* CAN communication terminal: GH1.25 connector cable - 2pin (length: 300mm) ×1
* Debugging serial signal cable: GH1.25 connector cable - 3pin (length: 300mm) ×1
Packaging Details:
* Weight: 1.2kg






 for Robot Joint")
 DM4340P Joint Motor Brushless Servo Motor with 27Nm Peak + USB-to-CAN Module")

 DM4340P Joint Motor + USB-to-CAN Module + Power Adapter Board + Two-Ended Cable")


 PLUS Ackerman Robot Car High-End Version w/ Swing Suspension Basic Package without Lidar")