ZNJ 7DOF GELLO Robotic Arm Low-Cost Teleoperation Device for xArm with Joint Mapping and Simulation
No se pudo cargar la disponibilidad de retiro

Attention:
* This product is an open-source project. Our
company mainly provides assembly services for guide arm hardware,
ensures the hardware is intact before shipment, and provides
hardware-related technical support.
* Gello has simulation functions.
Other matters, such as code verification with the main arm, need to be
completed by the user. In addition, the Gello series does not have
gravity compensation function. If needed, FACTOR is recommended.
*
Open-source projects have no warranty. If joint wear or structural
component damage occurs due to long-term use, the user needs to purchase
the corresponding product for replacement.
* Please read the
relevant open-source materials carefully before purchasing and confirm
that the product meets your needs before placing an order.
* Access materials: https://wuphilipp.github.io/gello_site/
Description:
GELLO — a low-cost universal teleoperation controller designed for large-scale collection of robot demonstration data.
It
constructs an intuitively operable physical device by replicating the
complete kinematic structure of the target robotic arm. Using 3D
printing and standard motor components, GELLO significantly lowers the
hardware barrier, allowing users to efficiently generate high-quality
operation data in an intuitive "hand-follows-arm" manner.
As a
universal controller with broad adaptability, GELLO has achieved full
compatibility with mainstream industrial and research robotic arms,
including Franka, UR5 and xArm, and supports flexible expansion.
Features:
ZNJ GELLO
* Robotic Arm Teleoperation System
Low-cost Construction, Rapid Deployment
*
Using 3D-printed parts and servo motors for Dynamixel, the hardware
cost is only a tiny fraction of traditional professional equipment, and
users can quickly customize according to the target robotic arm
parameters.
* Ready-to-use design templates are provided for three
mainstream robotic arms for Franka, UR5, and xArm, allowing users to
complete assembly and calibration in just a few hours.
Intuitive Control, Real Experience Comparable to the Target Robotic Arm
*
The kinematic structure of the GELLO controller (including joint layout
and link proportions) is strictly consistent with the target robotic
arm. Operators can directly map actions through kinesthetic teaching,
reducing learning costs and operational errors.
* Supports dynamic
scaling parameters (e.g., a comfortable operation ratio of α=0.5) to
balance human-machine interaction comfort and precision.
Efficient Data Collection, Performance Surpassing Traditional Equipment
*
Studies have shown that compared with VR controllers, 3D space mice and
other devices, GELLO improves task completion speed, trajectory
accuracy, and operation success rate by more than 30%, especially in
contact-intensive tasks (such as screwing bottle caps and precision
assembly).
* Supports real-time joint position reading and command mapping, eliminating delay interference and ensuring data continuity.
Support for Complex Tasks, Expanding the Boundaries of Robot Capabilities
*
Can perform bimanual collaborative operations (such as opening cans
with both hands, multi-object handling) and high-precision
force-controlled tasks (such as plugging/unplugging interfaces, surface
fitting), providing diverse scene data for imitation learning.
* Stacking Blocks
* Opening and Closing a Laptop
* External Dexterous Grasping
* Cleaning a Whiteboard
* Stacking Cups
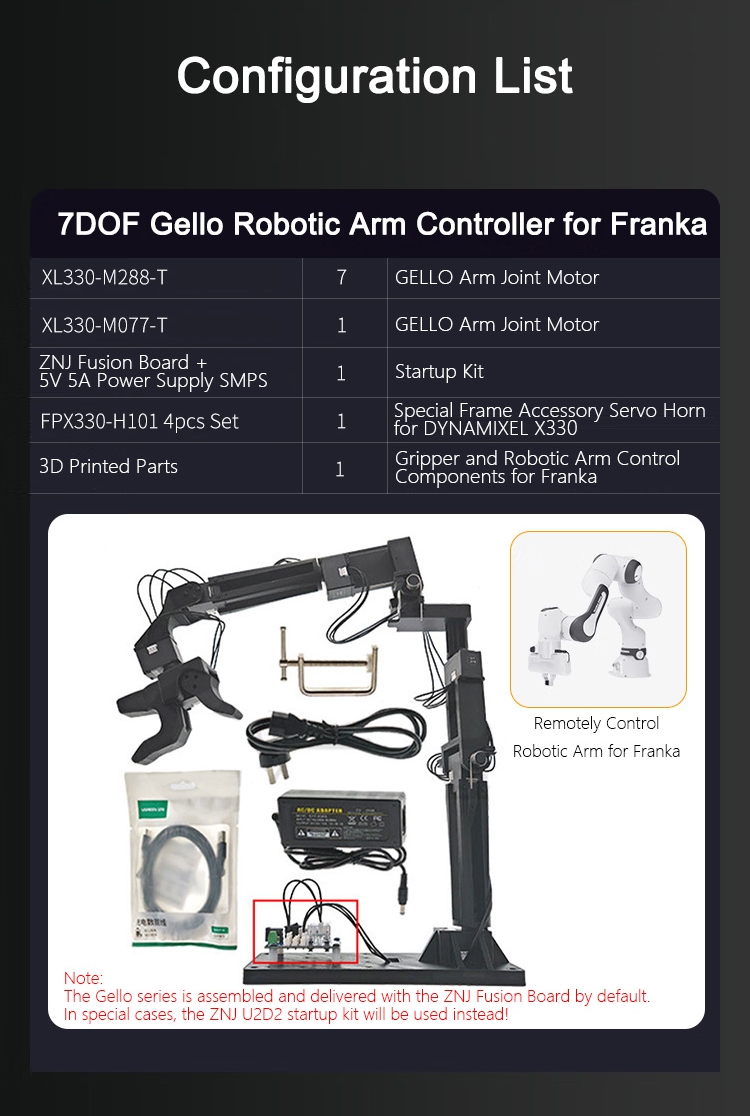
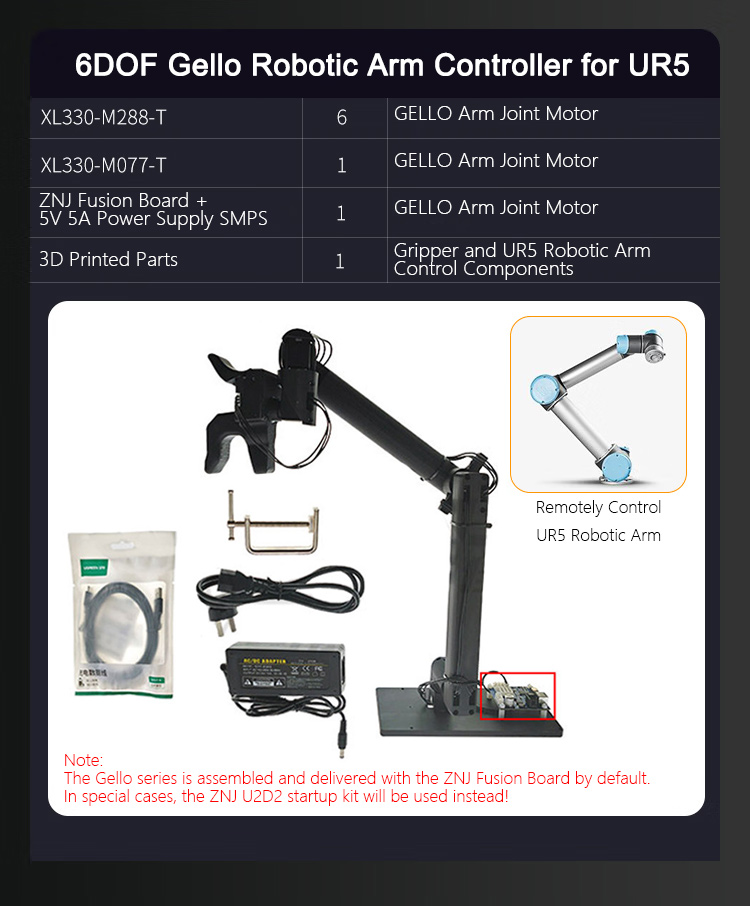
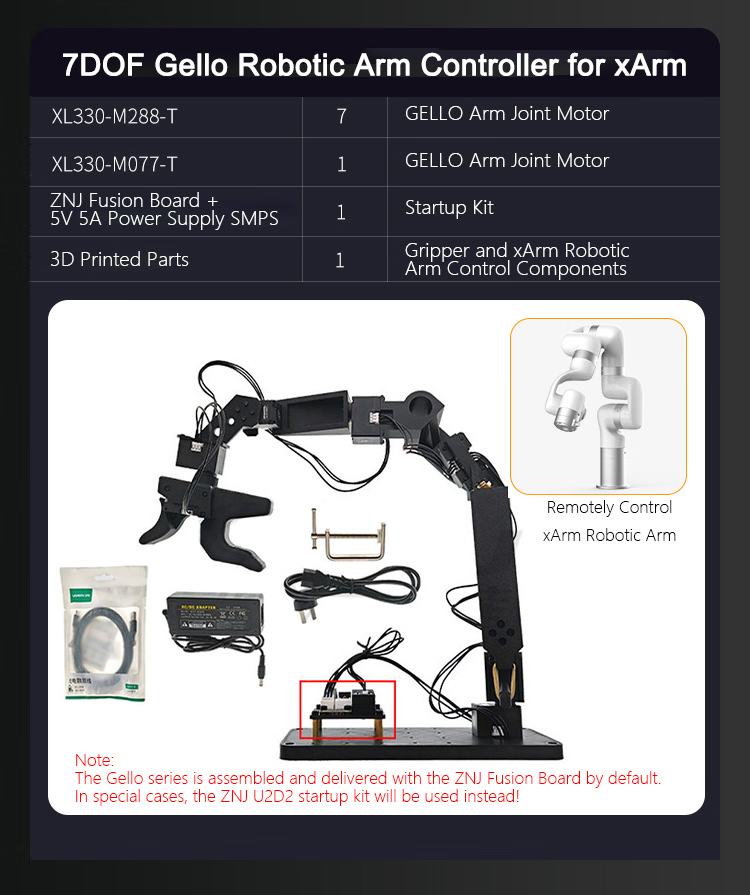
GELLO Arm Joint Motor:
*
The XL330 series is a compact and lightweight motor for DYNAMIXEL,
offering a highly practical solution for building small-scale
applications or operating in confined spaces.
* Unlike entry-level
models in the AX series, the XL330 has a voltage range of 3.7V to 6V and
supports multiple operating modes, including current-based position
control and current control.
* Operating modes: Speed Control,
Position Control, Extended Position Control, PWM Control, Current
Control, Current-based Position Control
* Profile control for smooth motion planning
* Input voltage: 3.7V ~ 6V (recommended 5V)
* Compact model for DYNAMIXEL - Dimensions: 20 x 34 x 26 (W x H x D) [mm] & Weight: 18g
* Supports RC protocol without additional conversion devices
* Reduces current consumption to save energy
Startup Kit: ZNJ Fusion Board + 5V 5A Power Supply SMPS
*
The ZNJ Fusion Board is compatible with all functions of ROBOTIS's
official U2D2 and U2D2 Power HUB boards, and also expands and enhances
other functions. The optimized features are as follows:
1. Power Supply Section
*
The ZNJ Fusion Board and the U2D2 Power HUB power board both support a
voltage range of 5V-24V. The theoretical maximum current it can
withstand reaches 20A, with a continuous working current of 10A; the
official board only supports a maximum of 10A theoretical and 5A
continuous current.
2. Servo Motor Drive Section
* The ZNJ
Fusion Board supports the USB drive mode of the official kit, and uses a
more robust Type-C interface. The board can drive up to 4 channels of
TTL communication servos or 4 channels of RS485 communication servos in
parallel, while the official board only supports 2 channels of each
output.
Note: The TTL and RS485 communication modes of the ZNJ Fusion Board support a baud rate of 4.5M or higher.
Special Structural Parts and Auxiliary Servo Horn for Dynamixel X330 (Optional):
* FPX330-H101 4pcs Set
* Special hinge structural parts and auxiliary servo horn set for DYNAMIXEL X330;
* Made of high-strength engineering plastic;
* Can be fixed with bolts and nuts;
* Grooves are designed for neat wiring and nut tightening;
* Hinge structural parts and auxiliary servo horn set are packaged together.
Packing List:
* 1 x Set of Master Arm
Packaging Details:
* Package dimensions: 35cm (L) x 25cm (W) x 15cm (H)
* Volumetric weight: 2.75kg