| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $15.81 | $15.48 | $15.00 | $14.36 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
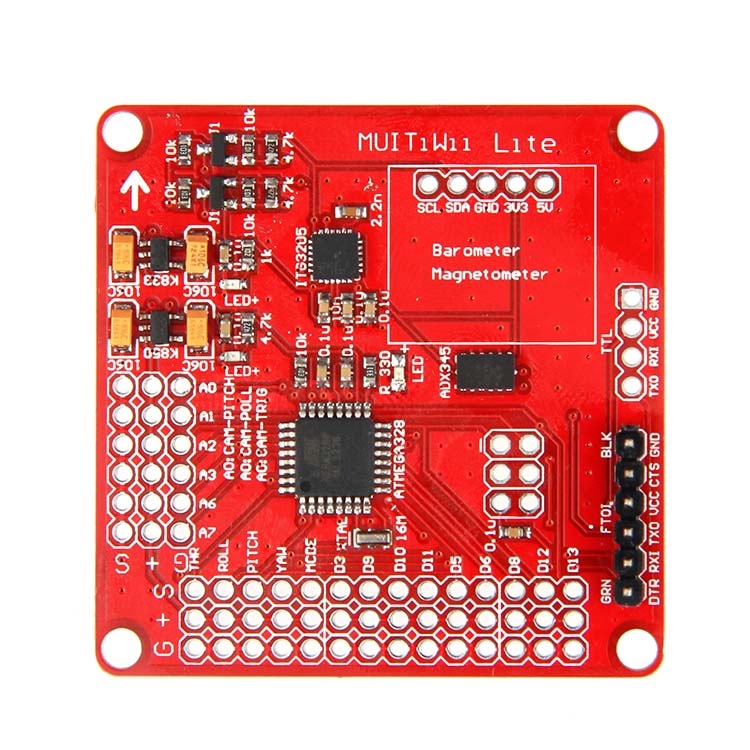
MWC MultiWii Lite MultiWii Copter RC Aircraft Control Devolopment Board for Flight Controller
MultiWii Mini hardware parameters:
- ATMega328P microcontroller
- MPU6050 three axis gyroscope + digital three axis acceleration sensor (digital automatic stabilization)
- Dual power supply regulator - separation, 3.3V/5V the maximum current 150mA/500mA
- Dual power indicator LED, 3.3V/5V
- High brightness blue indicator LED
MWC support for peripheral equipment:
- Bluetooth debug parameters module: for Android mobile phone / tablet computer
- OLED display module : can be used as airborne - state / parameter display, can also remote debugging parameter collocation
- I2C-GPS navigation panel - 328P flight control can be through which connect with GPS, with airlines flight function for fixed / rth (possible future)
- GPS - for fixed-point / automatic return
- OSD - FPV necessary, can display the flight control system and GPS data
- Data transmission module APC2XX/Xbee/3DR, used for ground station function
- Optical module used for fixed-point flight of outdoor light is strong (under developing)
- Sonar module used for low altitude (4~5 meters) high precision high flying (under developing)
The vehicle model supported by MWC:
Download the latest firmware supports the following vehicle model, free in the source code select desired pattern and upload to the flight control.
- GIMBAL - independent gimbal stabilizer (non flight use)
- SINGLECOPTER - VTOL single shaft
- BICOPTER - 2 axis Afanda aircraft
- Tricopter - Y type 3 axis
- QUADP - The classic 4 axis + mode
- QUADX - 4 x axis mode
- Y4 - Y type 4 axis
- Y6 - Y type 6 axis
- HEX6 - 6 axis + mode
- HEX6X - 6 x axis mode
- OCTOX8 - 8 x 4 - axis mode
- OCTOFLATP - 8 axis horizontal + mode
- OCTOFLATX - 8 level x axis mode
- FLYING - WING - wing
- VTAIL4 - V tail (4 axis flight mode with X mode, steering characteristic is more flexible, mainly as a fixed wing to fly)
- AIRPLANE - Fixed Wing
- HELI_120_CCPM - /120 helicopter DEG oblique disk test version, development
- HELI_90_DEG - /90 helicopter DEG oblique disk test version, development
The remote control of the MWC firmware requirements:
- Remote control device needs at least 4 channels, cannot be switched to flight mode, it is strongly recommended more than 6 channel with two to three segment / two switch channels
- The remote controller with sub channel adjustment and stroke adjustment function
- Need to support remote fixed wing mode, or cancel any mixing output
The flight control board can achieve the following basic functions:
- Acro (no self stability, similar to KK, but the attitude is more accurate)
- Self stabilization
- Set high
- Locking course
- HeadFree (headless mode, MK called "CareFree", ACM "Simple")
Through the remote control switch channel specified for the combination of several basic functions, such as:
- Self stabilization + high + lock course, temporary removal of control;
- Self stabilization + high + + fixed * lock course
- Self stabilization + high + + automatically return * lock course
Need to connect with the GPS receiver in I2C-GPS navigation
The size parameters of Multiwii Mini flight control:
- Length and width (mm): 50 x 50
- The fixed Kong Kongju (mm): 45
- The fixed hole diameter (mm): 3
Package included:
- 1 x Devolopment Board