| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $567.53 | $555.95 | $538.57 | $515.41 | Contact US |
4WD ROS Robot Chassis 4PCS High Torque Encoder Motor 15KG Load Capacity Pneumatic Tire Chassis
Description:
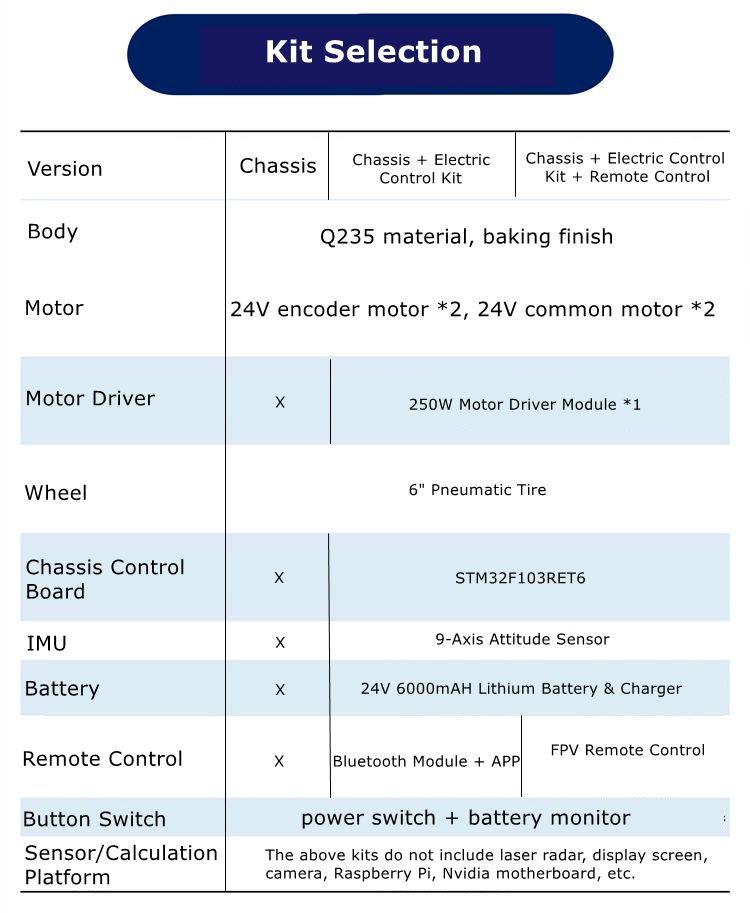
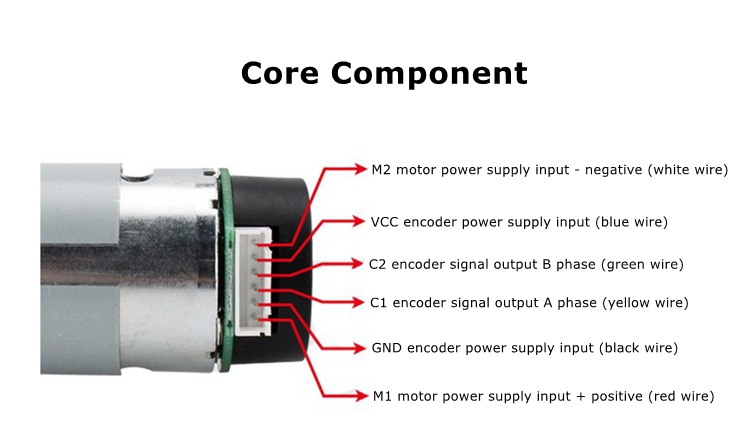
- This series of chassis is equipped with STM32 chassis control board (optional), which supports chassis control through serial port. The STM32 chassis control board integrates a 9-axis IMU, and the chassis is driven by a high torque encoder motor, which can feedback tire speed and has a load capacity of 15kg. Combined with the ROS driver we provide, it is very suitable for the development of ROS robots.
Chassis Technical Parameters:
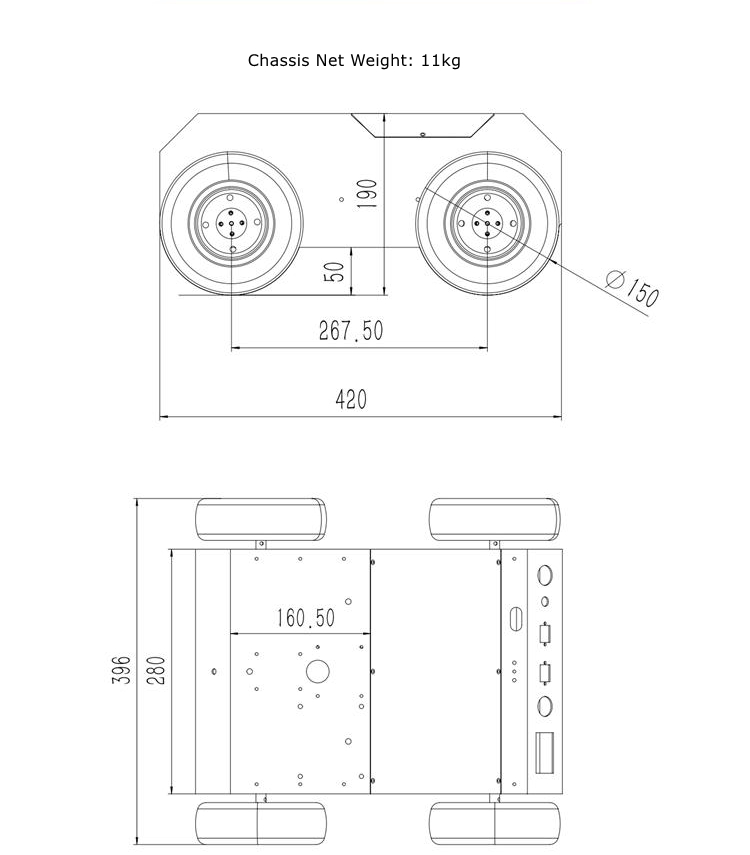
- Chassis size: 420 x 396 x 190mm
- Material: 2mm thickness Q235 sheet metal
- Endurance: no load ≥ 3 hours
- Maximum speed: 1m/s (adjustable)
- Chassis net weight: 11kg
- Load capacity: 15kg
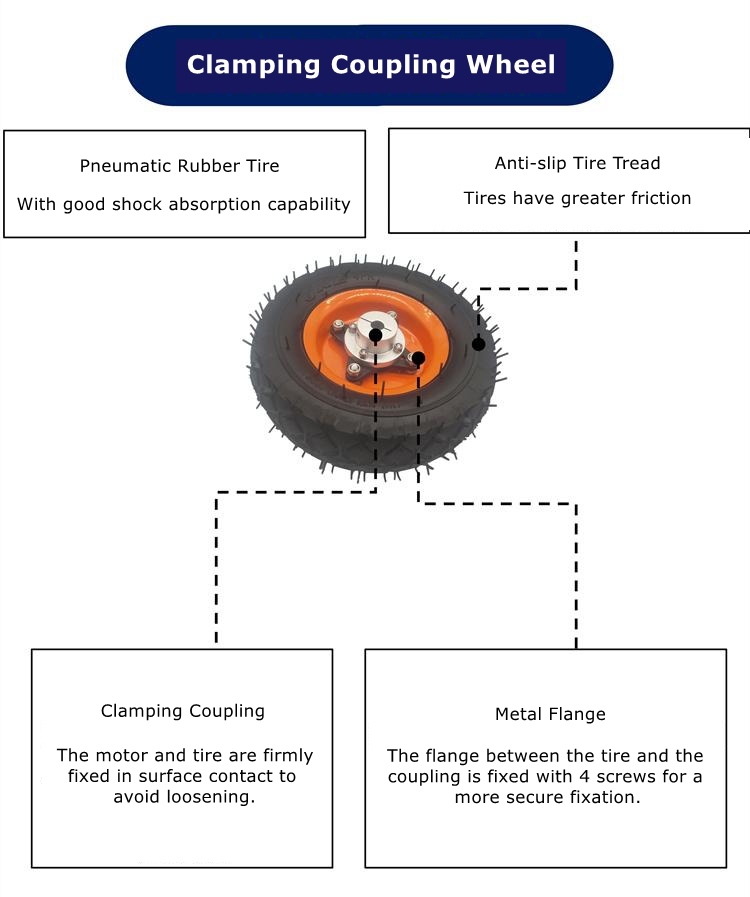
- Wheel: 150mm pneumatic tire
Electric Control Parameter:
- Control method: serial port, Bluetooth APP control
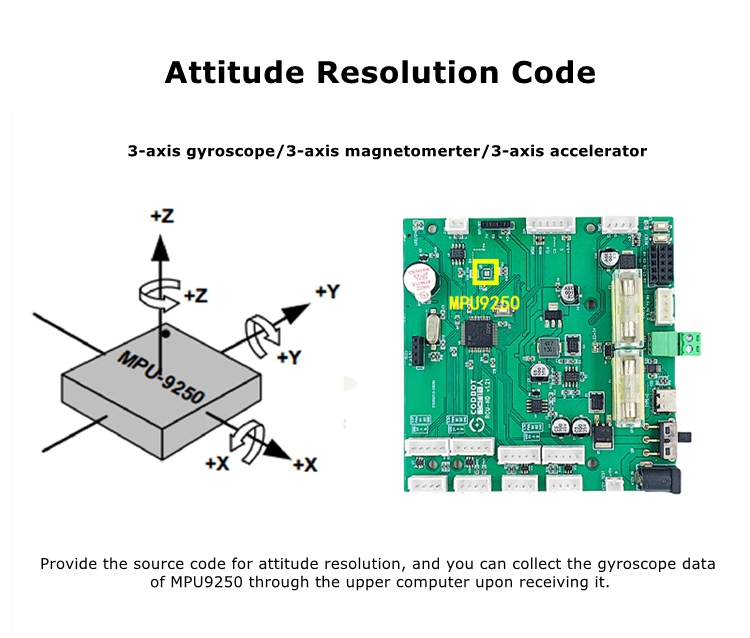
- Gyroscope: 9-axis IMU
- Communication contents: speed control, speed feedback, battery voltage feedback, IMU data feedback
- Resources: STM32 source code, ROS driver, 3D model
- Reserved voltage: 1-channel 24V, 1-channel 5V (reserved bottom control board)
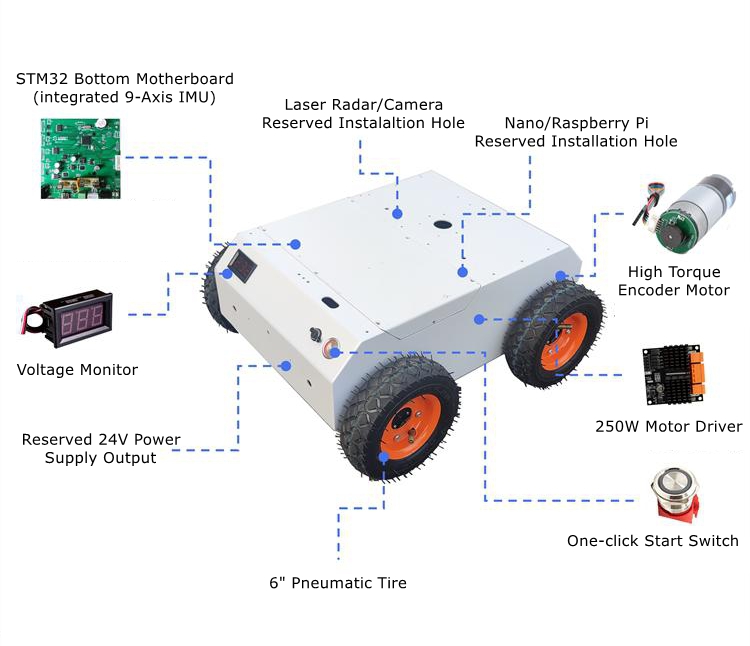
Chassis Structure:
- The chassis is reserved with mounting holes for SLAMTEC A1 radar and ORBBEC depth camera, as well as mounting holes for Jetson NONA and Raspberry Pi, making it easy to expand into ROS robots.
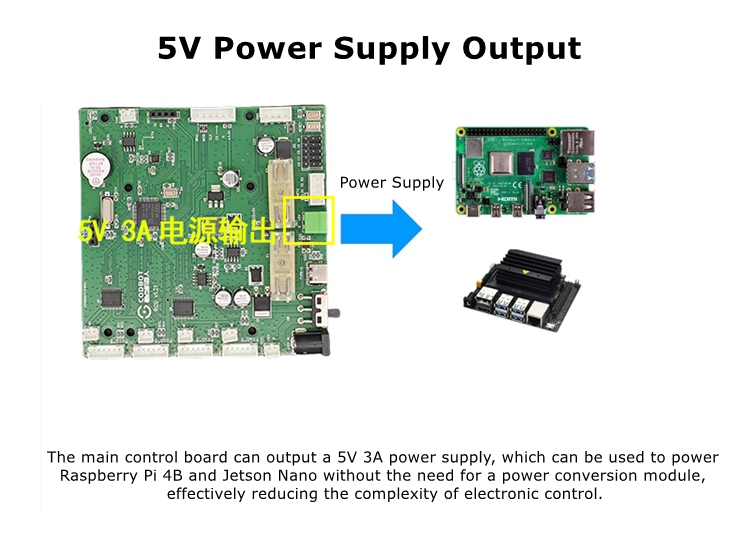
- The chassis is reserved with one 24V interface (24V 2A) and one 5V interface (5V 2A) for convenient power supply to upper level equipment.
Providing ROS Driver:
- In the system for Ubuntu ros, by directly calling the ROS driver we provide, it is possible to achieve communication control of the chassis through the serial port, thereby controlling the motor.
- The chassis serial port adopts Type-C interface, which is convenient to use.

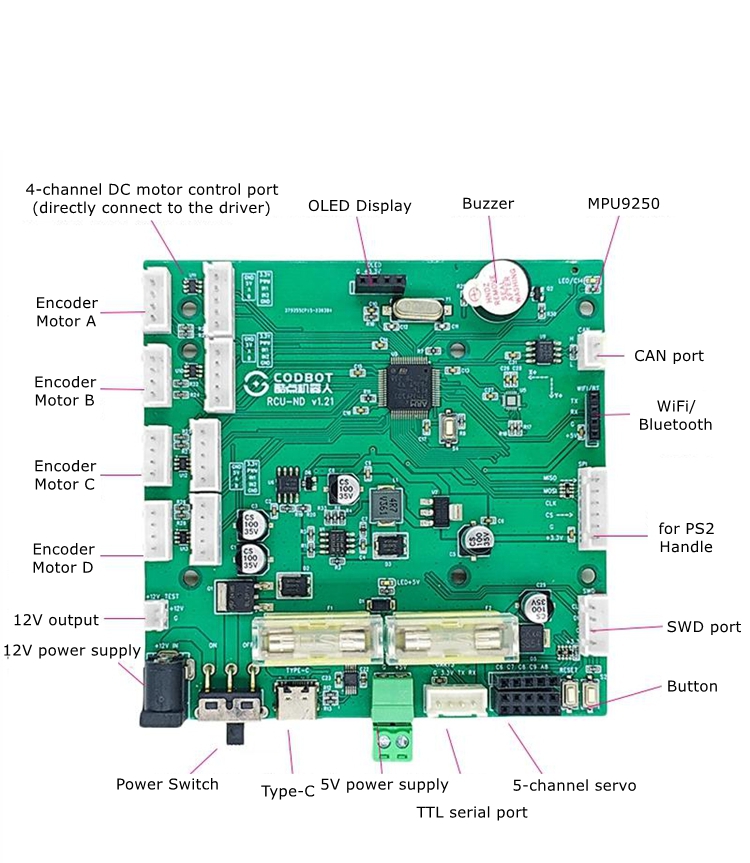
Main Control Board Technical Parameters:
- Main control chip: STM32F103RET6
- Master frequency: 72M
- Pin number: 64
- IMU chip: MPU9250
- CAN chip: SN65HVD231DR
- Motor driver chip: TB6612FNG (2pcs)
- Control servo number: 5-channel PWM output (5V voltage)
- Serial communication: 1-channel Type-C serial port, 1-channel TTL serial port
- LED: 1-channel power supply LED and 1-channel user LED
- Button: 1-channel user button and 1-channel reset button
- Protection: power supply reverse connection protection, motor and servo over-current protection
- Power supply voltage: 5 - 29V
- Program download: SWD or serial port one-click download
- Other functions: support Bluetooth/WiFi module access, support 0.96-inch OLED screen access
- Size: 99.8 x 99.8mm

High Power Motor Driver Parameter:
- Power supply voltage (VP): 6.5 - 28V
- Over-voltage protection value: 28.5V
- Under-voltage protection value: 6.3V
- Power supply current (IP): 24A (double terminal wiring)
- Single channel continuous output current (Imc): 12A (VP=24V, resistive load)
- Single channel peak value output current (Imp): 70A (VP=24V, t=100ms)
- Single channel peak value output current (Imp): 200A (VP=24V, t=10ms)
- Logic input voltage (Vin): 3 - 5.5V (Same amplitude as the logic signal)
- Logic input current (Iin): 15mA (VCC= 5V)
- PWM input frequency: 18 - 60kHz
- PWM minimum pulse width: 2uS (positive, negative pulse)
- Over-temperature protection: 85℃ to 95℃
- Working temperature: -25℃ to 85℃
Package Included:
- 1 x Chassis
Note:
- Please contact us to get the related development resources after receiving the products.









 w/ 3KG Load Capacity & 12V 1:30 DC Motors")



