| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $27.63 | $27.06 | $26.22 | $25.09 | Contact US |
 ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$190.49
ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$190.49
 ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module 3-Phase Robot Arm Joint Motor
$182.72
ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module 3-Phase Robot Arm Joint Motor
$182.72
 ROBSTRIDE05 5.5N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$116.24
ROBSTRIDE05 5.5N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$116.24
DM-IMU-L1 6-Axis Inertial Measuring Unit Module BMI088 Constant Temperature Attitude Calculation with USB to CAN Adapter Module
Precaution:
- Please connect the connecting wires correctly according to the instructions before use to avoid damaging the interface and circuit board.
- Please use according to the recommended working environment such as voltage, current, temperature in the manual to avoid damage and affect the product's service life.
- Please check if all components are intact before use. If any components are missing, aging, damaged, etc., please stop using them.
- Take precautions during use and do not open the casing to expose the PCBA without authorization to prevent static electricity, physical damage, etc; Keep the circuit board clean and prevent short circuits or performance degradation caused by foreign objects.
- When abnormal situations such as sparking, smoking, or burning smell occur during the power on or use of the circuit board, please immediately turn off the power.
Description:
- DM-IMU-L1 is a product with built-in BMI088 three-axis accelerometer and three-axis gyroscope with EKF quaternion attitude calculation IMU. The main control frequency is up to 200MHz, supporting USB, RS485, CAN protocol output, supporting output of acceleration, angular velocity, Euler angle, quaternion and other data, with a data output frequency of up to 1kHz. The bottom of the sensor chip adopts an island structure design to enhance the seismic performance of the IMU. The sensor chip is equipped with a heating circuit around it, which can achieve constant temperature control and effectively reduce gyroscope temperature drift, without full temperature calibration.
- More information: https://gitee.com/kit-miao/dm-imu
Key Features:
- Supports for CAN, USB, RS485 protocol output
- Support 100-1000 adjustable output frequency
- Equipped with heating circuit for constant temperature control
- Internal EKF algorithm attitude calculation
Specification:
Attitude Angle Parameter:
- Roll angle: ±180°(typical value); 0.02°(zero drift one hour after calibration)
- Heading angle: ±180°(typical value); 12.686°(zero drift one hour after calibration)
- Pitch angle: ±90°(typical value); 0.064°(zero drift one hour after calibration)
Accelerometer Parameter:
- Range: ±6G
- DOF: 3
- Non-linearity: ±0.5%FS
- Zero offset: 20mg
- Bandwidth: 230Hz
Gyroscope Parameter:
- Range: ±2000°/s
- DOF: 3
- Non-linearity: ±0.05%FS
- Zero offset: ±1°/s
- Bandwidth: 116Hz
Physical and Electrical Parameter:
- Input voltage: 5 - 28V
- Power consumption (at 24V): 2.5W for rising temperature; 0.47W for stable status
- Communication interface: USB, RS485, CAN
- Output frequency: 100 - 1000Hz adjustable
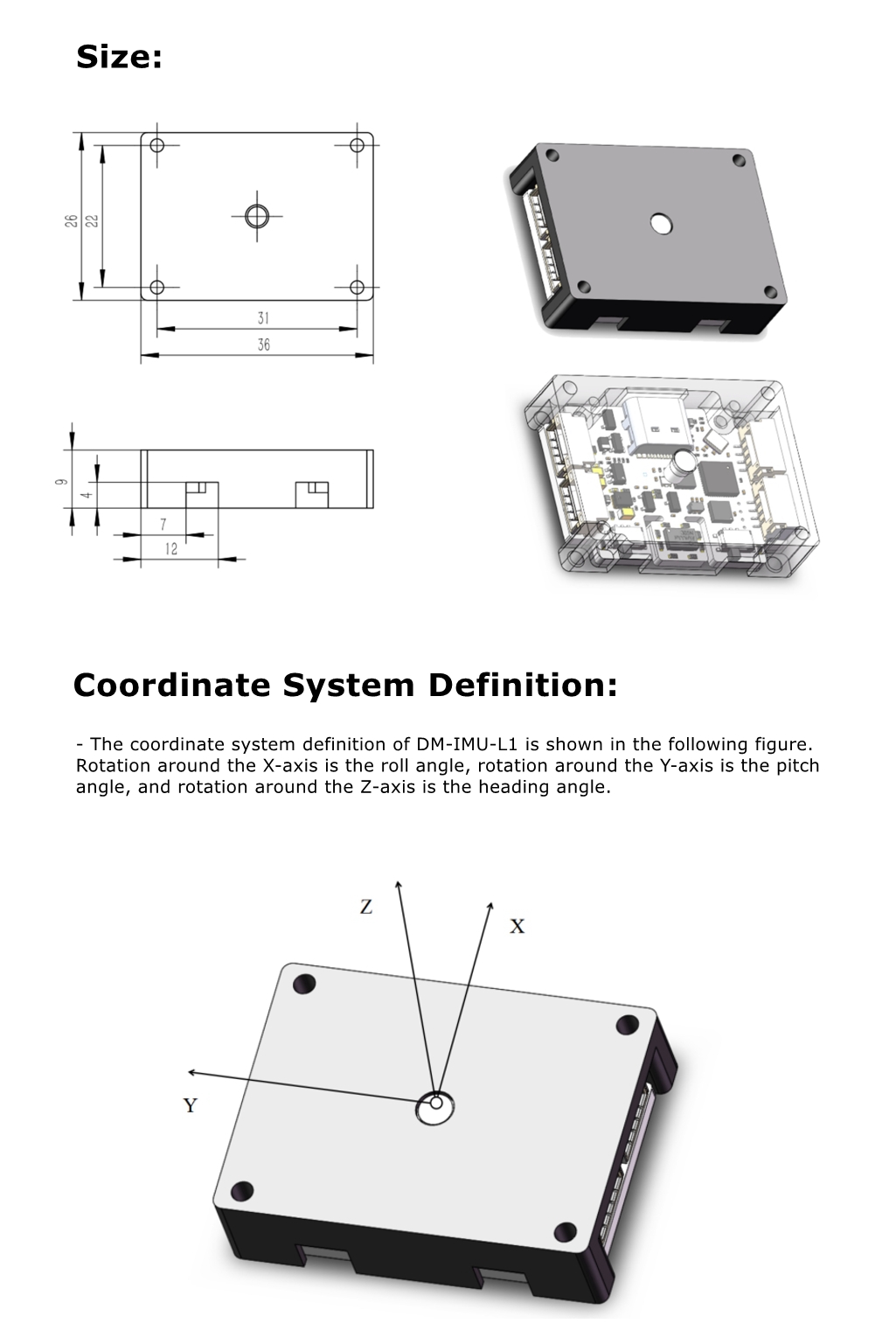
- Product size: 36 x 26 x 9mm
- Net weight: about 1.5g
Package Included:
- 1 x IMU Module
- 1 x Type-C Cable
- 1 x GH1.25 Pin Cable
- 1 x USB to CAN Adapter Cable
- 2 x Connection Cables













")

