| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $78.64 | $77.03 | $74.62 | $71.41 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
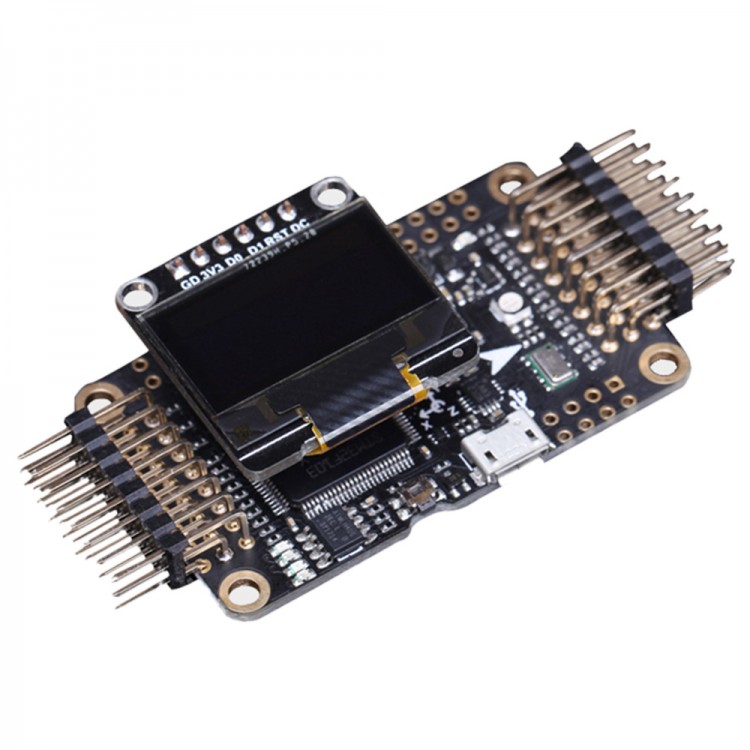
HT-Hawk Open Source STM32F103 Flight Control Board with Case for FPV Multicopter RC Quadcopter
Description:
The flight control board is mainly for the development of quadcopter, as well as hexacopter and octocopter. It is an open source automatic driving system to realize the function of stabilization. It is for entertainment , FPV and other activities.
Features:
- 4* Blue LED
- PCB, not easy for oxidation
Function:
- Adjust the PID parameters on the ground station onlinr
- Geomagnetic calibration model
- Ultrasonic wave defines height
- 3 Layers of protective cases with shock-proof ball
STM32F103 specification:
- FLASH chip: AT24C256
- Board supply voltage 5V
- Operating current: 4mA when the voltage is 5V
- Gyroscope range: -+250 500 1000 2000 deg/s
- Frequecy: 1000hz
- USB analog seriel port: MICRO-USB interface
- STM32F103VCT6: 32bit ARM CORTEX-M3 processor
Package included:
- 1 x Flight Control Board with Case