| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $1,774.20 | $1,737.99 | $1,683.68 | $1,611.26 | Contact US |
 ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$190.49
ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$190.49
 ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module 3-Phase Robot Arm Joint Motor
$182.72
ROBSTRIDE06 36N·m Integrated High Performance QDD Actuator Module 3-Phase Robot Arm Joint Motor
$182.72
 ROBSTRIDE05 5.5N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$116.24
ROBSTRIDE05 5.5N·m Integrated High Performance QDD Actuator Module Robot Arm Joint Motor with CAN to USB Debugging Module
$116.24
JetCobot myCobot280 270mm 7DOF AI Vision Collaborative Robotic Arm (Jetson Orin NX SUPER 8GB)
Advantages:
* 7-DOF robotic arm
* With a 0.3MP camera
* Custom-molded gripper
* UR-style robotic structure
* Concealed servo wiring design
* 270mm reach: wide range of motion with more accessible positions
* Coordinate control and inverse kinematics algorithms simplify operation
* Rich course resources
* Open-source Python code
Description:
JetCobot is a desktop-level AI vision collaborative robotic arm for ROS educational scenarios. It is equipped with the myCobot280 7-DOF collaborative robotic arm and a high-definition camera gripper system. With integrated hand-eye coordination, it achieves seamless fusion of the robotic arm, vision, and control, enabling accurate recognition of objects such as colors, faces, and human poses. By calculating the geometric relationships, it can precisely locate, grasp, and track objects.
Powered by the NVIDIA Jetson series main controller, it integrates the ROS (robot operating system) and inverse kinematics algorithms to simplify the complex motion control of the 7-DOF robotic arm. It supports coordinate control, motion planning, collision detection, and pick-and-sort functions, providing a powerful and flexible platform for ROS-based education and research.
Features:
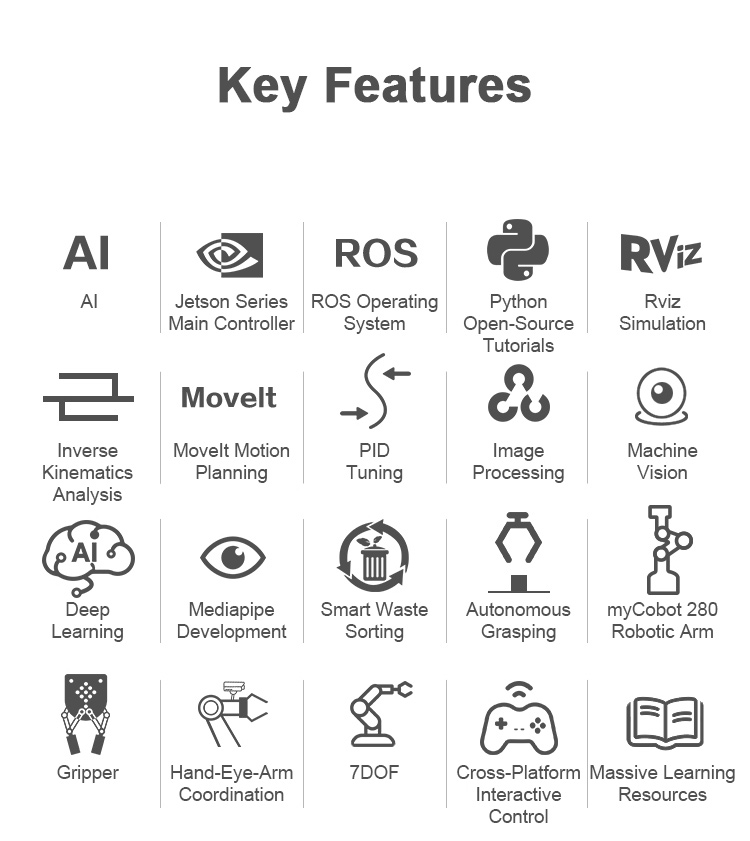
AI Vision Collaborative Robotic Arm
* AI Vision Interaction
* Inverse Kinematics Algorithm
* Integrated Hand-Eye-Arm Coordination
* 7-DOF Agile Robotic Arm
* Powered by Jetson Series Main Controller
UR-Style Robot Structure
* JetCobot adopts a UR-style robot structure with a smooth body, combining rigidity and flexibility with elegant curves. Compared to other types of robotic arms, it offers a larger range of motion and more reachable positions.
Hand, Eye, and Arm Integration
* The hand-eye-arm are integrated into one unit, requiring no external cameras or complex calibration. It achieves millimeter-level precision in positioning and operation.
* Repeatability accuracy: ±0.5mm.
AI Visual Recognition and Target Tracking
* Color Recognition and Tracking: Besides standard colors, it can extract and track custom colors for robotic arm color recognition, enabling "eye-following-hand" operation.
* Color Block Sorting: Place wooden blocks within the map recognition area. The robotic arm will automatically identify the block's color and place it in the corresponding color region on the map.
* Color Block Grabbing: Place a wooden block in front of the camera; after recognizing its color, the robotic arm grabs the block from the corresponding color region and moves it to the center area.
* Color Interaction: Choose the robot's favorite color, and it will follow the target color back and forth.
* Face Recognition and Tracking: It detects whether a face appears in the current frame. Once recognized, it marks the face and tracks its movement.
* Tag Recognition and Intelligent Palletizing: It recognizes different AprilTag codes and determines the position of the tagged blocks, enabling intelligent stacking and palletizing.
Deep Learning and Model Training
* It supports region-based recognition for grasping and placing, as well as free-form region detection for flexible grasping.
* Garbage Classification: The JetCobot kit includes blocks with garbage patterns. By loading the corresponding model, JetCobot can quickly identify different types of "garbage" and place them into the appropriate classification areas.
MediaPipe Development and AI Interaction Upgrades
* Control action groups via gestures
* Control stacking through gesture recognition
* The robotic arm can recognize and track palms
* Control the robotic arm through gestures and postures
Robotic Arm Movelt Kinematics
* URDF kinematics simulation model: A full-scale, physically accurate simulation model with Movelt tool visualization and control. It supports drag-and-drop, preset position control, and robotic arm motion obstacle avoidance functions.
* Movelt Simulation Control/Trajectory Planning: While controlling robotic arm movements in the simulation interface, the physical robotic arm can perform corresponding real actions.
* Collision Detection: Create obstacles in the simulation interface and drive the robotic arm to perform random movements. The robotic arm will avoid obstacles while moving.
* Spatial Grasping: Import pre-planned scenes to drive the robotic arm to perform object grasping and placing actions within the scene, with collision detection applied to the environment.
Remote Control Methods
* Wireless gamepad remote control (standard)
* Web-based Jupyter Lab control
Inverse Kinematics Algorithm
* JetCobot has a built-in advanced inverse kinematics algorithm. Simply input the desired coordinates, and it will precisely drive the robotic arm to the specified position, with support for setting the gripper orientation.
7DOF Collaborative Robot
* JetCobot is a compact yet powerful 7-axis collaborative robot designed for user self-programming and development. It is easy to operate and can safely collaborate with humans.
JetCobot Working Radius
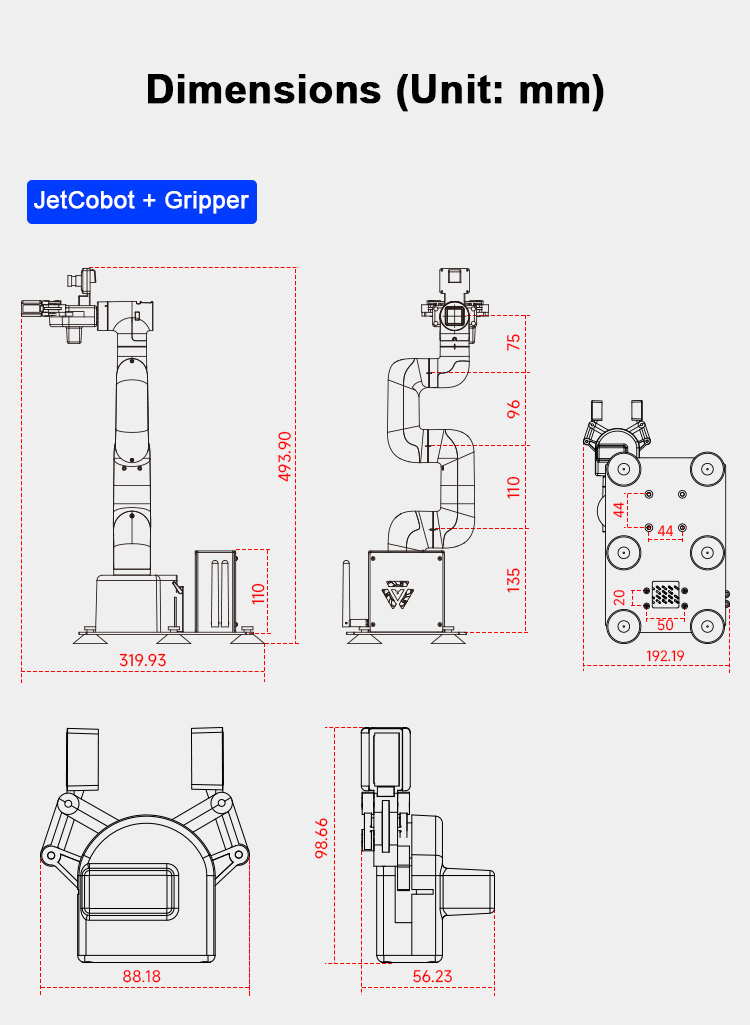
* JetCobot's maximum effective reach is 270mm (without gripper) and 374.5mm (with gripper), with repeatability accuracy of ±0.5mm.
Movelt Simulation Control
JetCobot supports Movelt simulation, allowing robotic control and algorithm verification in a virtual environment, reducing the requirements for physical lab setups and improving experiment efficiency.
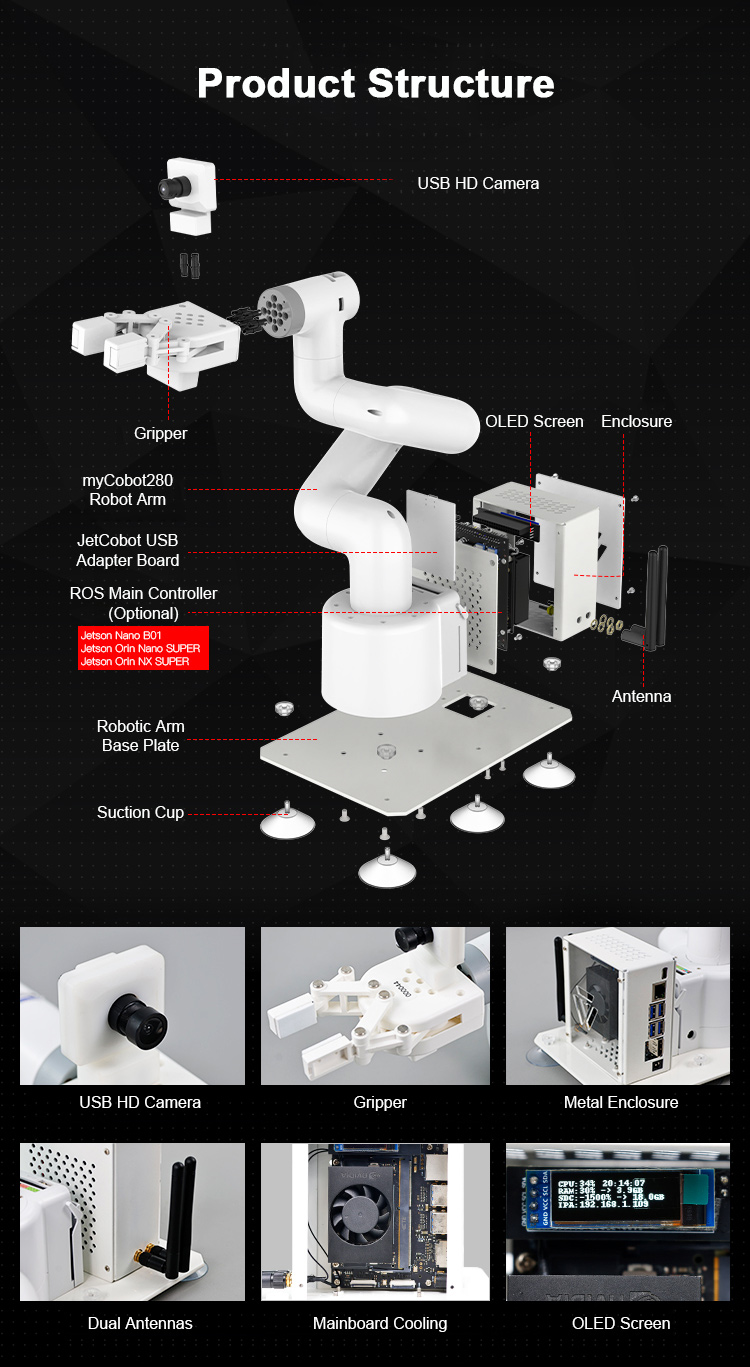
USB HD Camera
* The robotic arm is equipped with a USB camera featuring 0.3MP resolution, 110° field of view, 480p resolution, and 30fps frame rate, providing high-quality image collection.
Custom-Molded Gripper
* The gripper is motor-driven with controllable acceleration and deceleration, minimizing impact on grasped objects. Positioning and gripping are controllable. It offers firm grasping, low risk of dropping objects, and ease of operation.
Product Specifications:
* Product Name: JetCobot Collaborative Robotic Arm
* Programming Language: Python
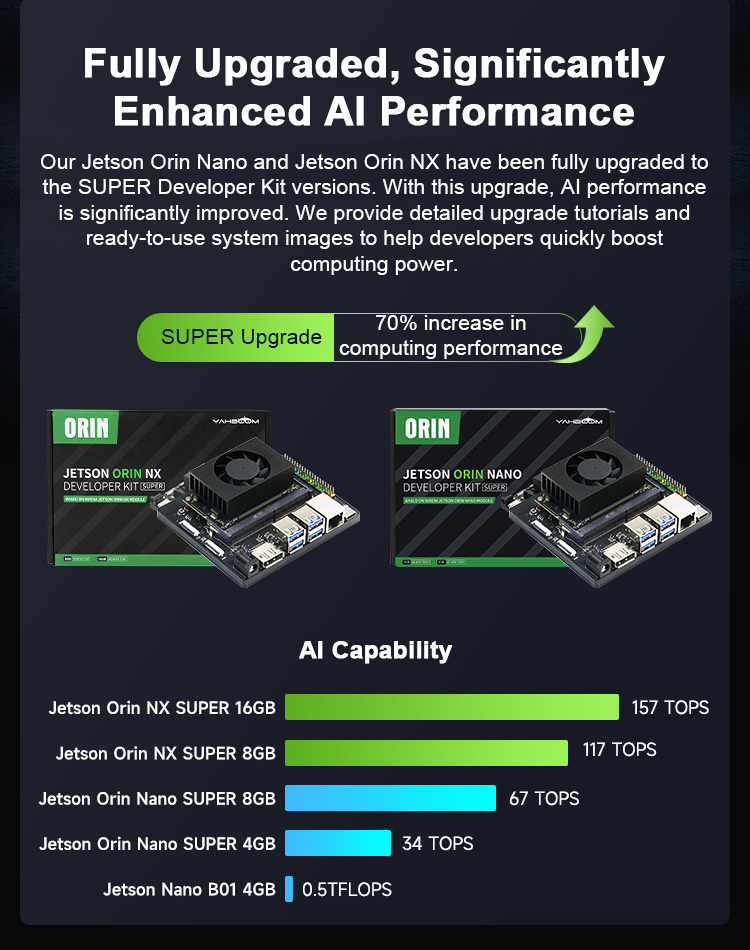
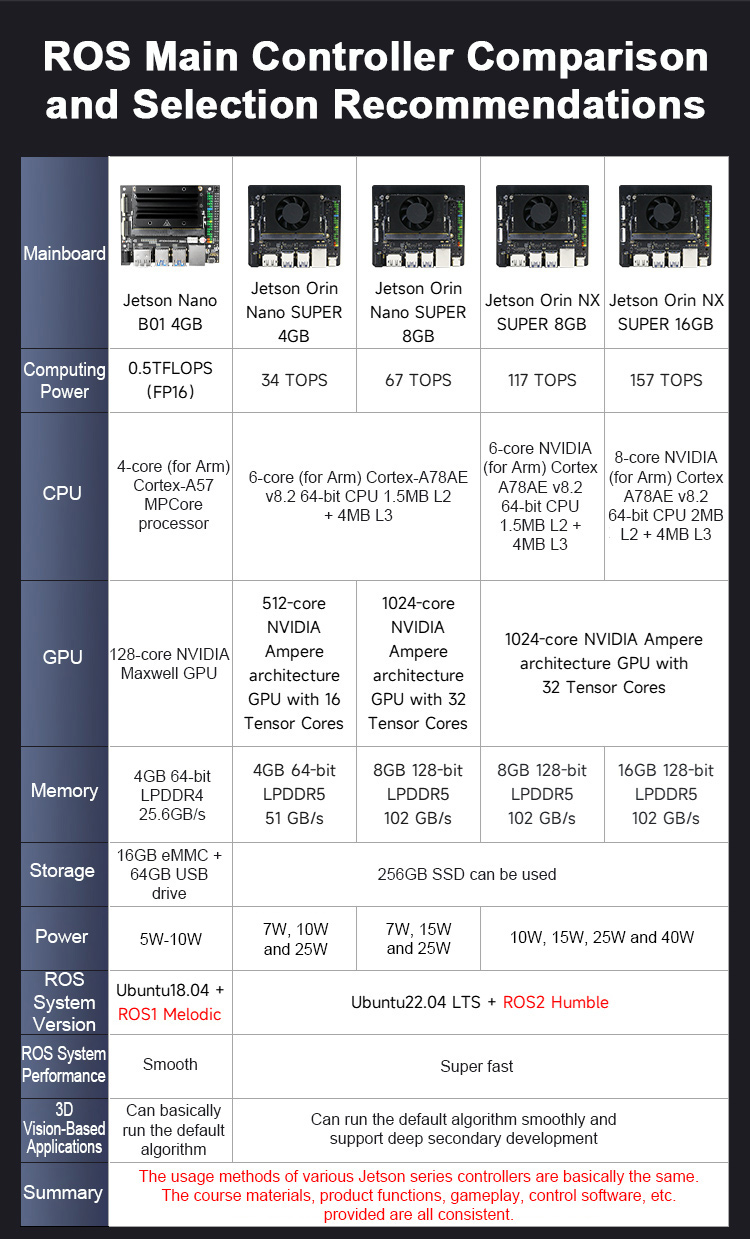
* Optional ROS Main Controller:
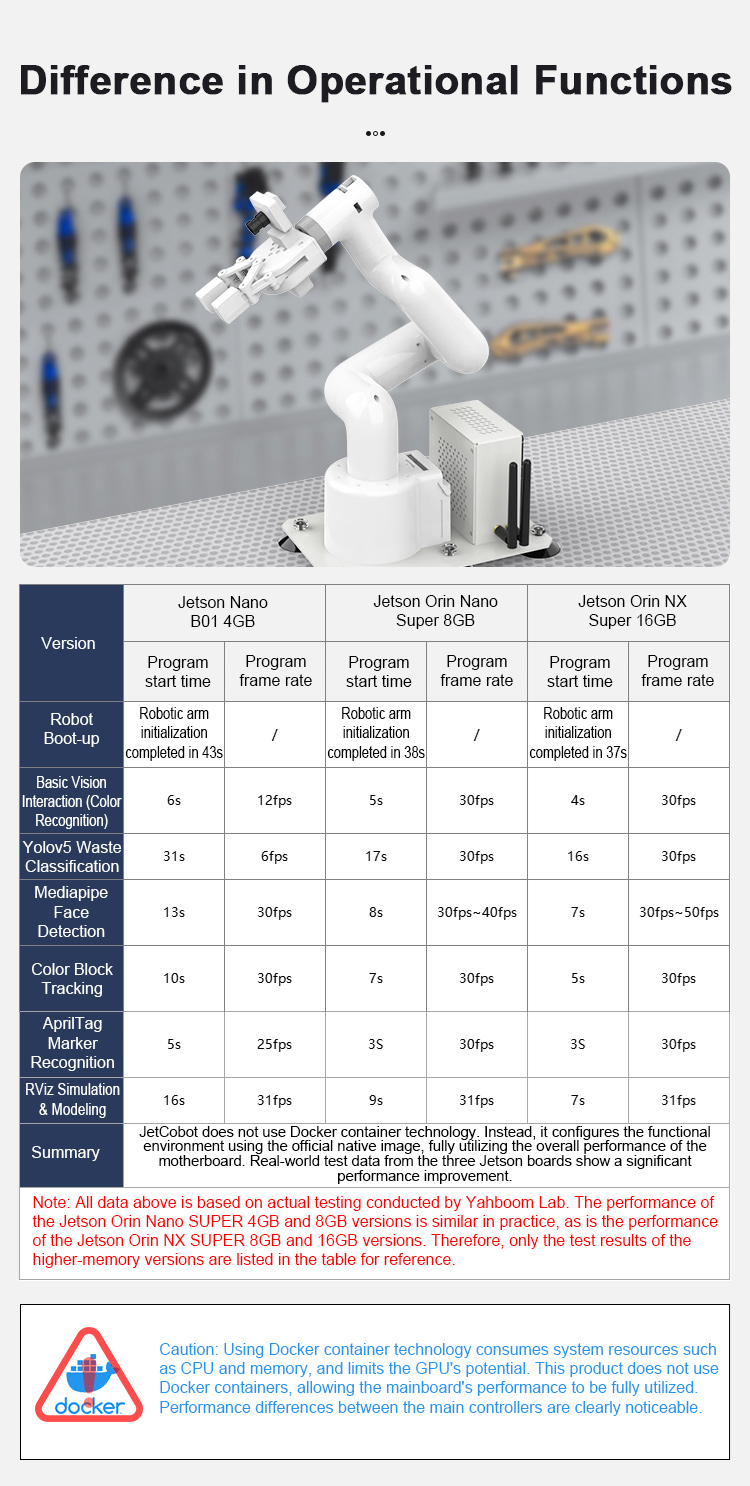
- Jetson Nano B01 4GB (Ubuntu 18.04 + ROS1 Melodic)
- Jetson Orin Nano SUPER 4GB/8GB (Ubuntu 22.04 + ROS2 Humble)
- Jetson Orin NX SUPER 8GB/16GB (Ubuntu 22.04 + ROS2 Humble)
* Robotic Arm Degrees of Freedom: 7
* Effective Payload: 233g
* Working Radius: 270mm (without gripper); 374.5mm (with gripper)
* Weight: Approximately 2310g (including mainboard)
* Power Supply: DC 12V 5A power adapter
* Power Plug Type: DC 5.5mm × 2.1mm
* Operating Temperature: -5 to 45°C
* Communication Method: Serial communication
* Material: Plastic
* Gripper Opening Range: 15.5-50.5mm
* Repeatability Accuracy: ±0.5mm
* Joint Rotation Angle: -153° to +153°
* Focus Type: Fixed focus
* Camera Pixel Count: 0.3MP
* Camera Cable Length: 70cm
* Shooting Angle: 110° wide angle
* Resolution: 480P (640 × 480)
* Frame Rate: 30fps
Parameters of the Camera:
* Pixels: 0.3MP
* Resolution: 480P (640 × 480)
* Connection: USB 2.0 Direct Connection
* Camera Cable Length: 70cm
* Field of View: 110°
* Frame Rate: 30fps
* Focus Type: Fixed Focus
* Housing Material: Resin
Parameters of the Gripper:
* Model: myCobot_gripperAg_white
* Manufacturing Process: ABS Injection Molding
* Color: White
* Clamping Range: 20-45mm
* Maximum Clamping Force: 150g
* Repeatability: 1mm
* Service Life: One year
* Drive Type: Electric
* Transmission Method: Gear + Linkage
* Dimensions: 112 × 94 × 50mm
* Weight: 110g
* Mounting Method: Connectors for LEGO
* Operating Environment: Normal temperature and pressure
* Control Interface: Serial control
Packing List:
* 1 x myCobot280 Robotic Arm
* 1 x Gripper
* 1 x USB Camera + Cable
* 1 x Metal Enclosure
* 1 x OLED Screen Expansion Board
* 1 x JetCobot USB Adapter Board
* 1 x Robotic Arm Base Plate
* 1 x Rear Panel of the Enclosure
* 1 x Acrylic Front Cover
* 6 x Suction Cups
* 1 x Power Adapter (12V)
* 1 x Set of Game Controller
* 1 x Angled Type-C Data Cable
* 1 x Set of Accessories
* 1 x Screwdriver
* 1 x User Manual
* 1 x Warranty Certificate
* 1 x Dedicated Map
* 8 x Visual Wooden Blocks
* 1 x Jetson Orin NX SUPER 8GB Mainboard
* 1 x Power Adapter (19V)
* 1 x 256GB SSD (Pre-loaded with Image)
* 2 x Antennas
* 1 x DP to HDMI-Compatible Adapter Cable (1.5m)
Packaging Details:
* Weight: 2.55kg
Note:
* 2pcs AAA batteries are not included.
Tutorials:
http://www.yahboom.net/study/JetCobot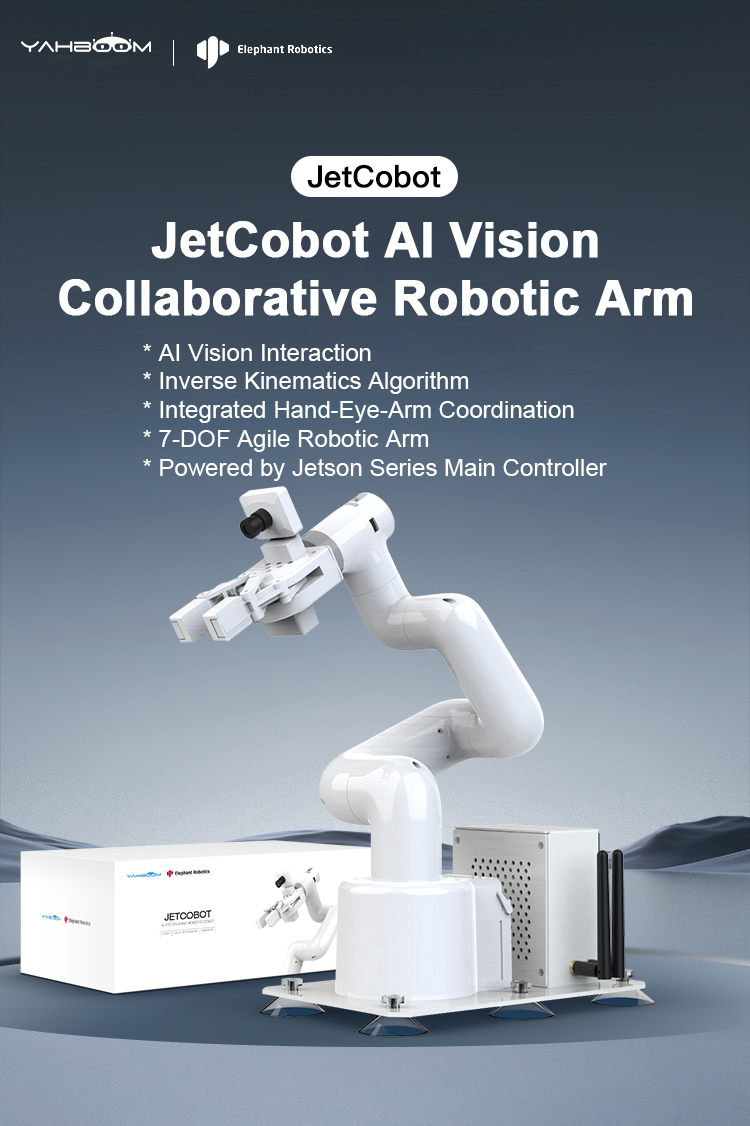





")
")
")
")

")
")
")
")
 PLUS Ackerman Robot Car Top-End Version w/ Independent Suspension Orin NX 8GB + C16 Lidar")
 with 67 TOPS of AI Performance and Power Adapter")
 Comes with 256GB SSD and Antennas")
 PLUS Ackerman Robot Car (Top-End Version w/ Independent Suspension Raspberry Pi 5 + N10P)")