| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $63.90 | $62.59 | $60.64 | $58.03 | Contact US |
 JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
JHEMCU F405 Wing Flight Control INAV Firmware 5V 8A BEC Built-in Barometer for Fixed Wing FPV Racing Drones
$51.32
 A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
A6 SE APM Opensource UAV Flight Control with Galvanometer Module and Note3 Ultra GPS for Pixhawk UAV Drones
$234.83
 CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
CUAV NEO 4SE High Precision Navigation Opensource GPS Positioning Module for U-blox M10 Satellite Receiving
$73.67
Kcopter Multiwiicopter MWC Flight Control Board with MultiWii MPU-6050 HMC5883L MS5611
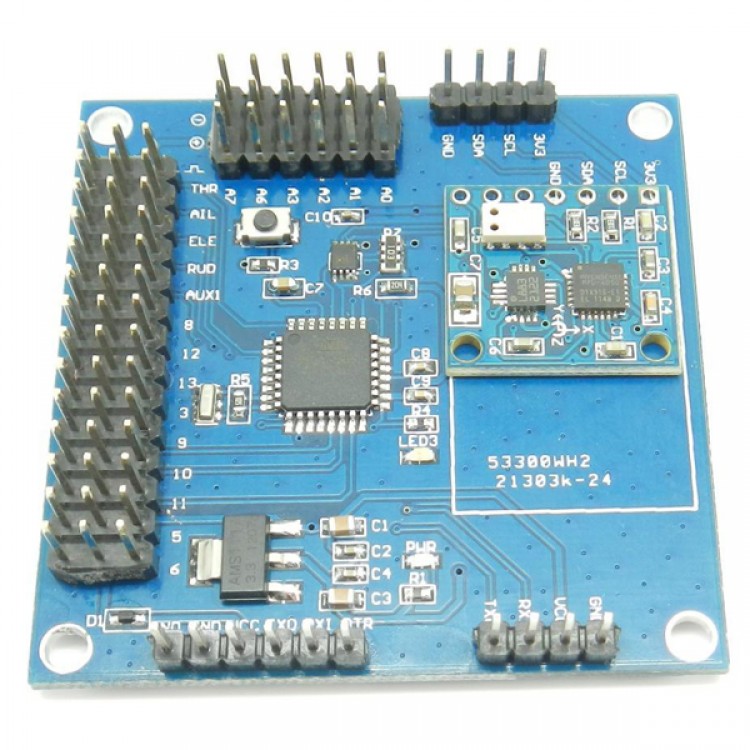
Overview:
- This is a Multiwiicopter MWC Flight Control Board with MultiWii MPU-6050 HMC5883L MS5611
- the size of this flight control board is 4MM*5MM,take ATMEGA328P-AU as main chip,connect sensor via I2C.can configurate all sensors.The main board includes LLC circuit,with HVI2C and LVI2C sensor Port .
Support following flying mode:
GIMBAL----independent PTZ stablizer(not for flight control)
BICOPTER---2 axis avatar aircraft
Tricopter---Y3(Y type 3 axis)
QUADP-----Classic 4 axis + mode
QUADX-----4 axis × mode
Y4------Y type 4 axis
Y6------Y type 6 axis
HEX6-----6 axis+ mode
HEX6X-----6 axis × Mode
OCTOX8----8 axis ×4 mode
OCTOFLATP---8 axis horizontal + mode
OCTOFLATX---8 axis horizontal X mode
FLYING WING--flying wing mode
VTAIL4----V empennage 4 axis mode(similar as X mode, but more flexible than X mode)
Support all sensors as following(not included):
- Acceleration transducer: ITG-3200、L3G4200D、MPU6050
- BMA180、BMA020、BMA180
- Compass module:HMC5843、HMC5883L、AK8975
PTZ stablizer(not for flight control use)
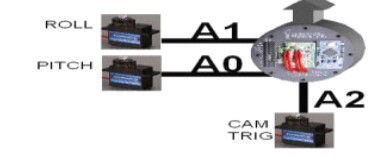
ESC connection:
- 4 axis QUADX/QUADX/Y4 standard receiver or PPM SUM Receiver,also can be used to enhance PTZ stability.
- ESC shall connect to D3/D9/D10/D11,Stability Servo connect to A0/A1,Shutter servo connect to A2
6 axis( Y6/HEX6/HEX6X)
- Standard receiver which needn't PTZ stability. A0/A1 output replaces D5/D6 , ESC connect to D3/D9/D10/D11/A0/A1
- PPM SUM Receiver need PTZ stability, ESC connect to D3/D9/D10/D11/D5/D6,stability servo connect to A0/A1,Shutter servo connect to A2;
- Standard receiver which need PTZ stability. A0/A1 output replaces D5/D6 , ESC connect to D3/D9/D10/D11/A0/A1,stability Servo connect to A2/D12,can not support shutter servo
8 Axis (OCTOX8/OCTOFLATP/OCTOFLATX)
- Standard receiver or PPM SUM receiver,ESC connect to D3/D9/D10/D11/A0/A1/A1/D12,doesn't support stability servo and shutter servo.
Receiver Connection
THR:accelerator
AIL:flap
ELE:up and decend
RUD:direction
AUX1:any switch channel (can control flying mode)
Wire connection and direction













 for Quadcopter")