| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $511.03 | $500.60 | $484.96 | $464.10 | Contact US |
M500 Mecanum Wheel Version 20KG Load Capacity Robotic Car Chassis STM32F407 with Electronic Control Opensource Development Kit
Precaution:
- This product is an experimental teaching model for students and cannot be used for civilian or industrial purposes.
Description:
- The M500 heavy-duty high-end version enhances the chassis load capacity and operating speed, and the chassis can be matched with multiple matching methods for easy DIY expansion. When combined with the ROS system version chassis, it achieves ideal teaching performance, cost-effectiveness, and quality.
- The chassis is made of thickened and hardened aluminum alloy material as the main body of the frame, greatly enhancing the load capacity of the chassis, and the aluminum alloy sheet is anodized and sandblasted to prevent static electricity.
Chassis Parameter:
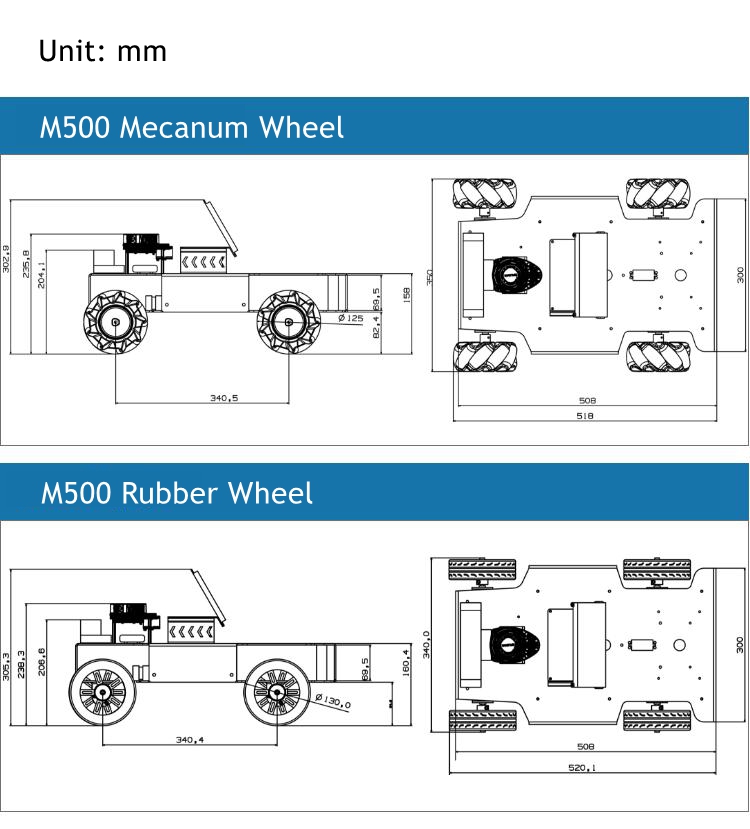
- Chassis size: 510 x 345 x 170mm
- Wheel diameter: 125mm
- Motor model: 12V 545 DC brushed deceleration motor
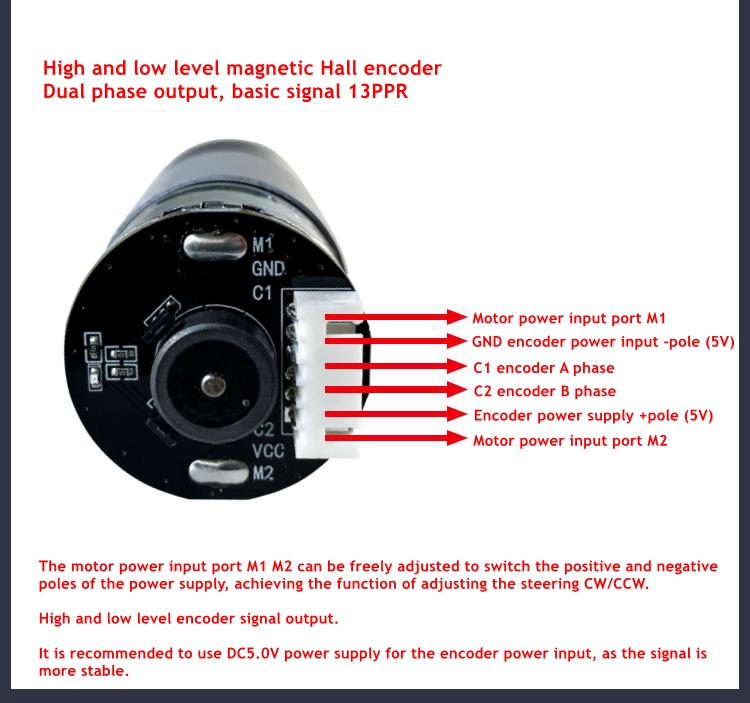
- Encoder: for Hall sensor
- Load and operating speed: 1.35m/s for no-load; 1.30m/s for 20kg load
- Maximum load capacity: 20kg
- Controller: STM32F407 control board + motor high power driving board
- Duration: ≤2 hours (light load)
- Suspension system: pendulum suspension, can adapt to uneven road surface
- Vertical obstacle crossing height: ≤37mm
- Ground clearance: 37mm
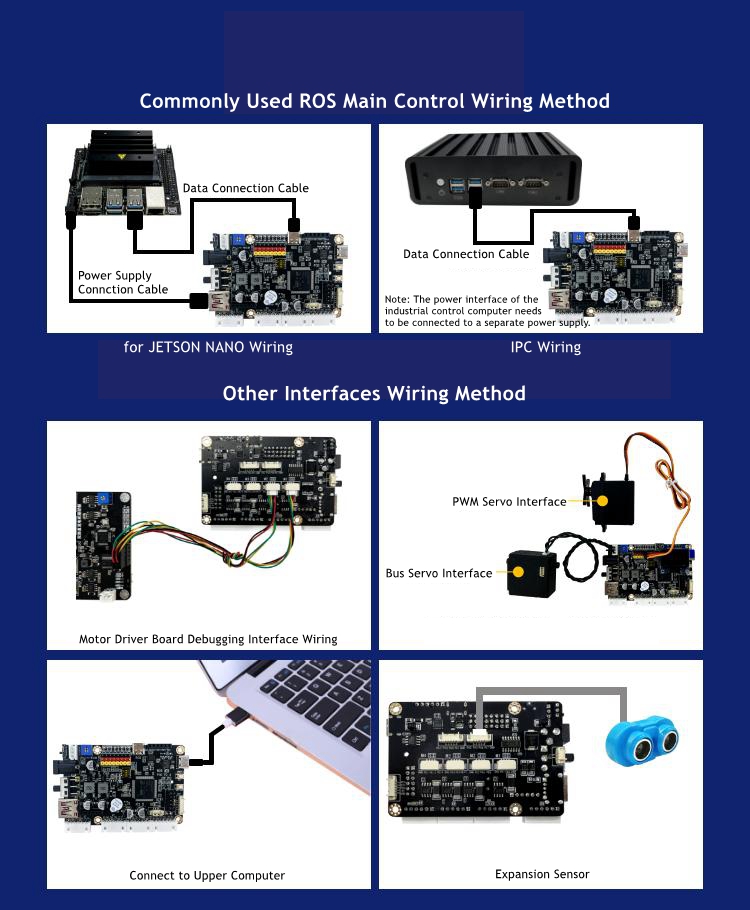
- Control method: FS model aircraft remote control, upper computer, serial port, etc.
- STM32 main control: STM32F407VET6
- Note: The chassis dimensions are manually measured with an error range of 1-10mm. The load testing site is a smooth paved road surface, and the data is for reference only.
Key Features:
- Pendulum suspension: when encountering uneven road surfaces or slopes, the pendulum suspension of the chassis can be used for shock absorption and balance of the vehicle body.
- Thickened aluminum alloy plate with high load, using anodized sandblasted aluminum oxide alloy, thickened and hardened to achieve high load operation.
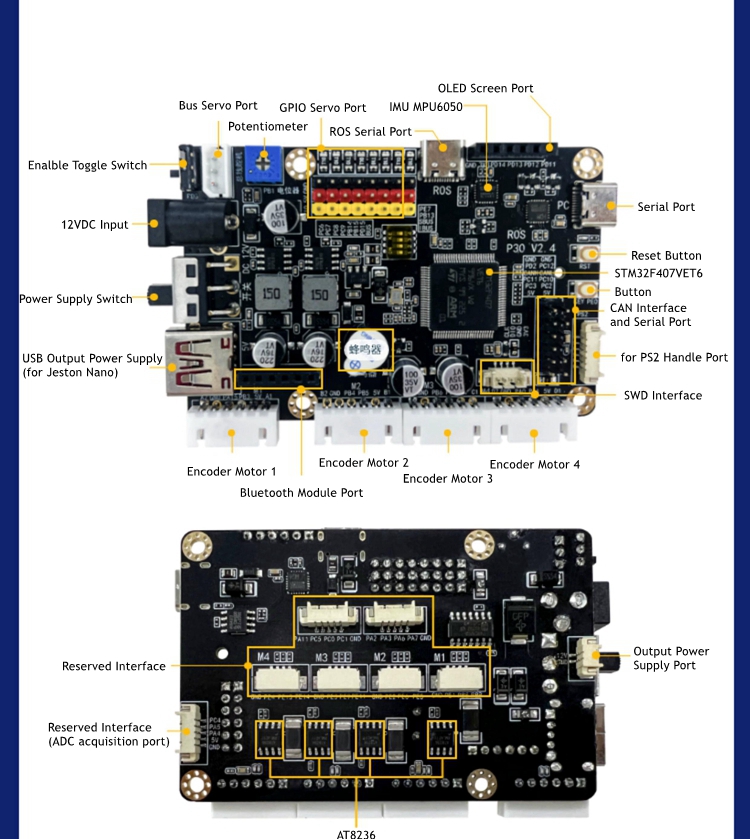
Controller Board Features:
- STM32F407VET6 main control.
- Onboard MPU6050 six axis sensor, sends its own data through serial port or CAN port.
- Supports 4-channel DC encoder motor (PID), integrated motor driver chip is AT8236, with a maximum current of 2A.
- Support OLED display screen to display motor operating parameters, voltage display, and display control status.
- Support for PS2 wireless controller and Bluetooth control for chassis movement.
- Reserved interfaces can be used as sensor expansion interfaces.
- The USB interface supports the upper computer to control and send its own data.
- Providing SWD debugging interface and support online debugging.
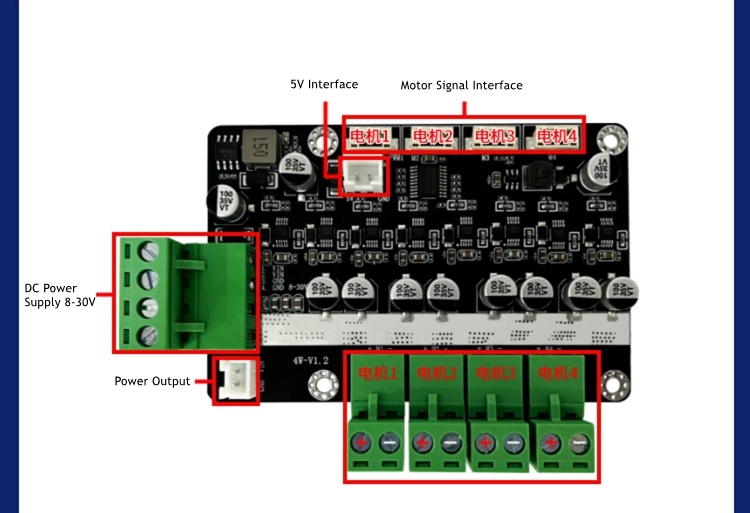
Motor Driver Board Parameter:
- Output channel number: 4 channels
- Working voltage: 8 - 30V
- 4-channel maximum current: 15A x 4 (Note: single channel motor locked-rotor or start current need to be less than 15A)
- Motor power: ≤60W
- Working temperature: 0℃ - 60℃
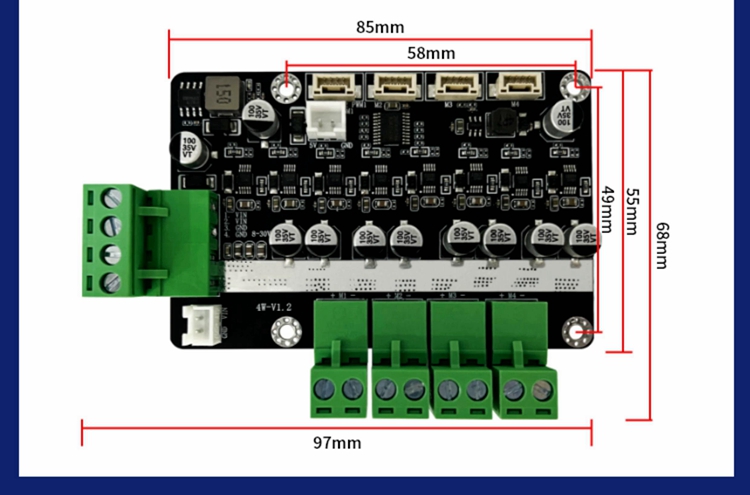
- Product size: 97 x 68 x 20mm
- Net weight: 45g
Motor Parameter:
- Deceleration ratio: 1:30
- Empty-load current: 0.3mA
- Empty-load speed: 200rpm
- Rated torque (Kg.cm): 3.0
- Rated torque (mN.m): 0.3
- Rated speed: 160rpm
- Rated current: ≤1.2A
- Blocking locked-rotor current: 7.2A
- Maximum bearing torque: ≤35kg·cm (3.5N·M)
- Locked-rotor current: 7A
Package Included:
- 1 x Metal Top Plate
- 1 x Metal Base Plate
- 3 x 12V545 Motor with Hall Encoder
- 4 x Motor Mount
- 4 x Coupling
- 4 x Wheels
- 4 x Profile Strip
- 2 x LED Light
- 4 x Motor Wire
- 1 x STM32F407 Control Board
- 1 x FS Aircraft Model Remote Control
- 1 x Motor Driver Board
Note:
- Battery is not included.