| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $959.82 | $940.23 | $910.85 | $871.67 | Contact US |
 Hiwonder LeArm 6DOF AI Robotic Arm Advanced Version with More Sensors & AI Interaction Expansion Kit
$432.28
Hiwonder LeArm 6DOF AI Robotic Arm Advanced Version with More Sensors & AI Interaction Expansion Kit
$432.28
 Hiwonder LeArm 6DOF Robot Arm ESP32 & Bus Servos (Intermediate Version Assembled with More Sensors)
$364.26
Hiwonder LeArm 6DOF Robot Arm ESP32 & Bus Servos (Intermediate Version Assembled with More Sensors)
$364.26
 Hiwonder LeArm 6DOF Robot Arm (Standard Version Assembled) w/ ESP32 Main Control Board & Bus Servos
$335.11
Hiwonder LeArm 6DOF Robot Arm (Standard Version Assembled) w/ ESP32 Main Control Board & Bus Servos
$335.11
Mecanum Wheel Car Assembled ROS Robot With Light Strips Industrial Design For Secondary Development
Advantages:
- Photoelectric encoder
- Lidar navigation
- 3d visual navigation
- Deep learning
- Full metal housing
- Metal mecanum wheels
- Pendulum suspension
- High-end industrial design
- Support secondary development
- FM Lidar
- Adjustable camera angle
- Patented product
- Built-in PID controller
- CAN/Serial control
- ROS operating system
- System for FreeRTOS
- Provide video tutorials
- Provide development manual
Features:
- ROS educational robot (with industrial design) with full metal body
- Provide code-level video tutorials
- Simple and elegant appearance with a light strip on both sides of the body
- High-precision photoelectric encoder. Upgraded 500-line high-precision AB-phase photoelectric encoder. Its accuracy is more than 38 times that of Hall encoders offered by other producers. The low-speed navigation performance of a car equipped with a photoelectric encoder is very good
- Camera angle can be adjusted. Whether it is line patrol, following, visual slam, etc., it can be adjusted to a suitable angle. The camera is placed on the front of the car without obstruction
- Pendulum suspension system and metal mecanum wheels. Its accuracy and life are better than those of general plastic mecanum wheels
- Laser Radar: The scanning frequency of A1 customized version can be steplessly adjusted between 7-16HZ, equipped with radar switch
- Provide Bluetooth & WIFI version APP (supporting for Android and IOS). 1. Support gravity sensor remote control and two-hand button remote control mode. 2. Support 5-channel waveform display interface, you can view the waveform at any time without a data cable. 3. Support 9-channel parameters adjustment interface and online adjustment of PID parameters. 4. Optimize alarm mechanism, APP accurately push low-voltage alarm notifications. 5. Support BLE Bluetooth 4.0 module
- Main board is designed for ROS, and its code is provided. The main board can communicate with the outside world through the serial port or CAN, and provides a 5V 5A interface for external power supply to boards such as for Raspberry Pi and Jetson Nano. The code and protocol are all open source. The mini master is carefully designed. Its size and mounting holes are the same as those for Raspberry Pi
Function List:
- Low-level ROS serial communication
- Reserved CAN communication interface
- IMU and mileage data feedback
- Voltage detection and voltage alarm
- ICM 20948 sensor
- Support serial port one-click download
- AI radar frequency stepless adjustment
- Gyro zero drift clearing
- Keyboard node control
- APP gravity sensor control
- APP adjusts PID parameters
- Application and tutorial
- Robot dynamic obstacle avoidance
- Robot fixed-point navigation and multi-point navigation
- TEB and DWA path planning
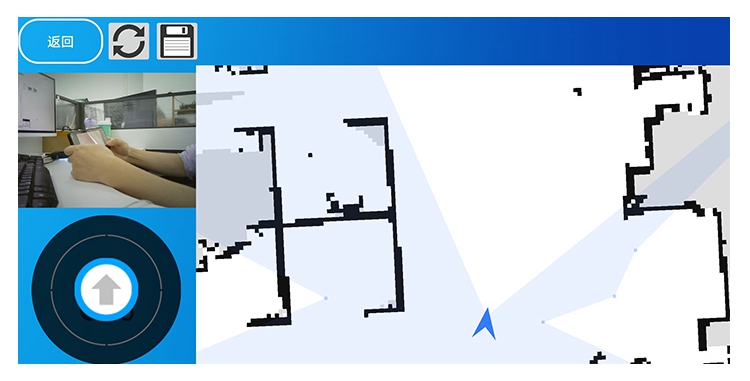
- ROS APP image transmission and control
- WEB browser displays camera image
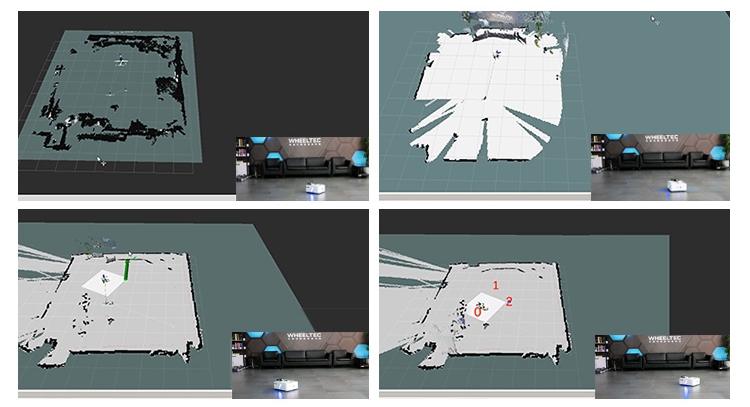
- Lidar mapping navigation
- Rtab pure visual mapping navigation
- Rtab vision + radar mapping navigation
- For Gmapping
- For Hector mapping
- For Karto build map
- For Cartographer
- For Tensor flow object recognition
- Lidar following
- Deep visual following
- KCF following
- AR tag recognition
- RGB visual line patrol (fusion radar obstacle avoidance)
- ROS APP mapping (NEW)
- ROS APP navigation (NEW)
- RRT autonomous mapping (NEW)
- Multi-robot formation (NEW)
Key Functions:
- Support rtabmap vision and lidar mapping navigation. Support for visual SLAM, gmapping, hector, karto, Google Cartographer and other algorithms to create maps, supporting fixed-point navigation and multi-point navigation
- Support APP to control, view images, build maps, and navigate. Realize car mapping and 2D navigation functions through ROS APP for Android
- RRT independently explores and builds maps. No need to manually control the car. Just use the RRT algorithm to autonomously complete the exploration map, save the map, and return to the starting point
- Multi-aircraft formation. Multi-machine coordinated operation and distributed formation control, supporting single-point and multi-point navigation
- Wireless controller. The motherboard reserves the controller receiver socket for PS2. The wireless controller can be used to control speed and steering. The speed can be adjusted steplessly through the joystick
- Support ROS2. The car is equipped with ROS1 by default, and provides ROS2 mirroring and video tutorials. After you get it, you can update the mirror and switch to ROS2. At present, ROS2 can achieve the following functions: keyboard node control, lidar follow, visual line patrol, slam_toolbox mapping, slam_g mapping, for cartographer mapping, 2D navigation. More functions of ROS2 are under development
Product Parameters:
- Drive structure: Four-wheel Mecanum wheel structure (with pendulum suspension)
- Wheels: 75mm/3" aluminum mecanum wheels
- Dimensions: 282 x 242 x 184mm/11.1 x 9.5 x 7.2"
- Car weight: 5kg/11 lb
- Load capacity: 3.9kg/8.6 lb
- Maximum speed: 1.35m/s
- Motor: MG513 motor
- Encoder: photoelectric encoder
- Control method: APP, wireless controller for PS2, CAN, serial port, etc.
- STM32 master: STM32F407VET6
- Lidar: SLAMTEC A1 customized version
- Depth camera: ORBBEC depth camera
- IMU sensor: ICM20948 (three-axis gyroscope + three-axis accelerometer + three-axis magnetometer)
- Operating system: STM32 equipped with system for freeRTOS; ROS for Ubuntu 18.04+melodic
- Information: full range of development manuals, video tutorials and STM32 source code
12V Motor:
- Rated voltage: 12V
- Rated power: 4.32W
- Motor type: permanent magnet brush
- Locked-rotor current: 2.8A
- Locked-rotor torque: 10kgf.cm
- Rated current: 360mA
- Rated torque: 1.0kgf.cm
- Speed before deceleration: 11000rpm
- Speed after deceleration: 366±10rpm
- Reduction ratio: 1:30
- Output shaft: diameter 6mm, D-shaft eccentric shaft
Encoder:
- Type: photoelectric encoder
- Number of lines: 500*30 (measured with the output shaft of the reducer)
- Power supply voltage: 3.3~5V
- Interface type: XH2.54
- Featured function: Built-in pull-up shaping, STM32 encoder interface mode, hardware counting
SLAMTEC A1 Customized Radar:
- Stepless adjustment 7~16HZ
- Equipped with a radar power switch: the radar can be turned off or on at any time
- Innovative design: the scanning frequency can be adjusted steplessly through the knob
- Built-in cp2102 chip
- Can be directly connected via USB data cable, no adapter board required
- 12m/39.4ft measuring radius
- 360° scanning and ranging
- Measurement frequency 8000 times/sec
- OPTMAG optical and magnetic fusion
Main Control Board:
- Main control chip: 100-pin STM32, with good expansion performance
- Model airplane remote control interface: support
- IMU chip: nine-axis ICM20948 (ICM20948 is a brand-new high-precision IMU chip. Its accuracy is several times higher than that of MPU050)
- Download: serial port one-key download or SWD interface download
- 5V power supply: dual 5V 5A
- CAN interface: reserved
- Linear CCD interface: reserved
- Electromagnetic line patrol interface: reserved
- GPIO reserved: dozens
Depth Camera:
- Depth resolution: up to 640x480
- RGB resolution: up to 640x480
- RGB sensor's FOV (HxV): 63.1° x 49.4°
- Depth sensor's FOV (HxV): 58.4° x 45.5°
- Monocularstructured light: monocular structured light + monocular RGB
- Deep frame rate: up to 30fps at 640x480
- RGB frame rate: up to 30fps at 640x480
- Depth range: 0.6m to 4m/2-13.1ft
- Dimensions (Dia.xH): 165 x 40 x 30mm/6.5 x 1.6 x 1.2"
- Data transmission interface: USB2.0 and above
Interface Description:
- CAN: The mobile platform can receive commands from the CAN port, and can also send its own data (odometer and IMU) through the CAN port.
- Serial port: The mobile platform can receive commands from the serial port, or send its own data (odometer and IMU) through the serial port.
- USB interface: used to connect to a computer, download the program with one key, receive the command control sent by the computer, and send its own data (odometer and IMU) to the serial port.
- Bluetooth (or wifi): It can send its own information to APP, can receive APP remote control commands, and can adjust PID parameters.
- Interface for PS2: Provide controller socket for PS2 and code. Just plug and play.
- SWD interface: SWD interface is provided for online debugging.
Open Source and Algorithm Description:
- Provide the complete source code of mobile platform and the schematic diagram of the controller. Provide detailed communication protocol and development manual of the interface. In addition, there are PID development notes and video tutorials.
- The mobile platform is mainly to solve the problem of "making wheels" in everyone's projects. With built-in PID closed-loop control and kinematics analysis, it can receive commands from serial port and CAN or even laptop.
Information Description:
1. The data is completely open source and supports secondary development
2. Provide ROS source code package. The ROS source code can quickly help you connect the car to the ROS system, and provide technical support for STM32, ROS, Linux, and SLAM
3. Provide a rich ROS introductory manual
4. Launched code-level ROS development manual
5. Deep learning video tutorial based on autonomous driving sand table scene (Chinese and English subtitles)
6. For Moveit robotic arm video tutorial (Chinese and English subtitles). Streamline code routines, rviz visual interface, take you into the robotic arm learning world for moveit
7. ROS SLAM principle and algorithm video tutorial (Chinese and English subtitles)
8. ROS basic topic video tutorial (Chinese and English subtitles)
9. STM32 bottom source code and ROS communication video tutorial (Chinese and English subtitles)
10. ROS-related basic tutorial for Ubuntu (Chinese and English subtitles). Quickly grasp the basics for Ubuntu related to ROS, and improve the backup and programming process for raspberry pi/jetson nano etc.
11. ROS function development code-level video tutorials (some videos have Chinese and English subtitles). Code analysis of core functions such as ROS mapping and navigation
12. ROS audio and video tutorial (Chinese and English subtitles). Provide basic application tutorials and code analysis combining ROS voice and for iFlytek
13. Thematic video tutorials on motors, servos, PID, etc. Principle of motor and servo, PID principle and its C language implementation, etc.
Package Included:
Mecanum Wheel Chassis:
12V30F MG513 motors x4
ORBBEC camera x1
Car shell x1
Car aluminum alloy cover x1
Aluminum alloy front base plate of car x1
Aluminum alloy rear base plate of car x1
A set of pendulum suspension mechanism x1
37 motor brackets x4
Metal flange couplings x4
Light strips x2
Switch x1
Several standard parts and their connecting parts
Electronic Control Part:
STM32F407VET6 integrated main control board x1
Bluetooth module x1
OLED display x1
Charger with protection x1
Data download cable x1
ROS Part:
For jetson nano x1
A1 Customized Lidar x1
32G high-speed memory and card reader x1
Wireless controller for PS2 x1
Several wires
Note:
- Battery is not included. A 12V 9800mah lithium polymer battery with T plug is recommended.
- It is assembled.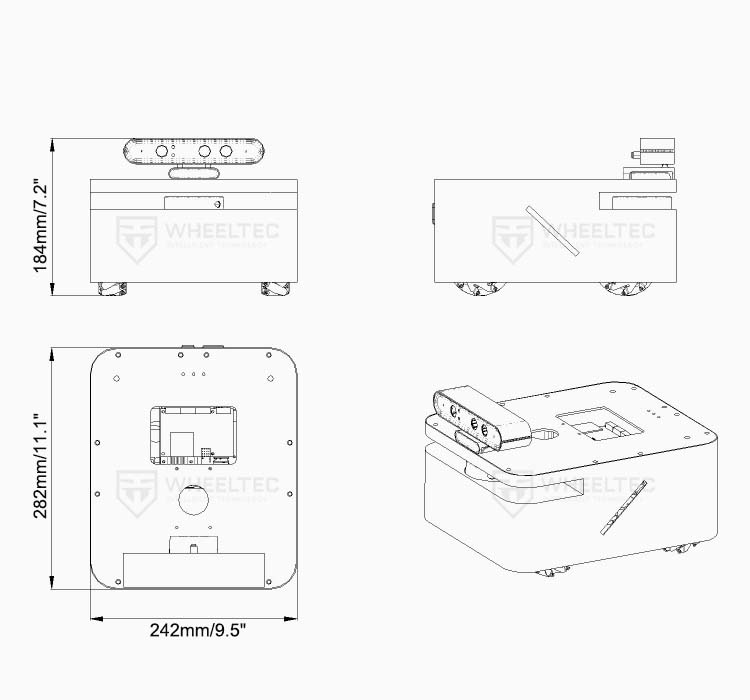







 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")
 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")


 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")
 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")
")
